Technische Daten
|
Modell |
ENC III |
Stromversorgung |
Integrierter Li-Ionen-Akku 3,7 V |
|
Typ |
ENC v.3 |
Akkukapazität |
5 Wh |
|
Max.Tauchtiefe |
300 m |
Typische Betriebsdauer |
20-35 h |
|
Testtiefe |
350 m |
Durchschnittliche Ladedauer |
< 2 h |
|
Tiefe zum Starten und |
Optional: 0,5, 1 oder 1,6 m (gemäß Norm EN 13319) |
Betriebstemperatur |
-10 bis +45 ⁰C |
|
Genauigkeit der Tiefenmessung |
0,3 m im gesamten Tiefenbereich, Temperaturbereich: 0 bis 30 °C |
Lagerungstemperatur |
-20 bis +45 ⁰C |
|
Kompassgenauigkeit |
<5 Grad* |
Temperatur beim Aufladen |
+10 bis +40 ⁰C |
|
Genauigkeit des Geschwindigkeitssensors |
< 2%* |
Montageart |
Universal |
|
Möglichkeit zur Verwendung an Land |
Bis 5000 m ü.N. N. |
Interne Speicherkapazität |
50 Routen |
|
Gewicht/Abtrieb |
290 g / -90 g |
Länge x Höhe x Breite |
95 x 71 x 30,6 mm |
* Die Messgenauigkeit variiert je nach Kalibrierungsqualität und Abwesenheit externer Störungen.
Enthaltene Sensoren: 3D-Magnetometer, 3D-Gyroskop, 3D-Beschleunigungsmesser, Drucksensor, Temperatursensor
Satelliten-Positionsermittlung: GPS, Beidou, GLONASS
Datenaustausch: über Bluetooth 4.2 und/oder USB-Kabel
Stromversorgung: Li-Ionen-Akku, 5 Wh Das Gerät kann über jede Stromquelle mit 5 V DC aufgeladen werden. Beim Aufladen können bis zu 1 A verbraucht werden. Beim Aufladen können bis zu 1 A verbraucht werden.
Abfallentsorgung
  | Dieses Gerät enthält Li-Ionen-Akkus und andere Materialien, die einer korrekten Entsorgung bedürfen. |
Mechanischer Aufbau
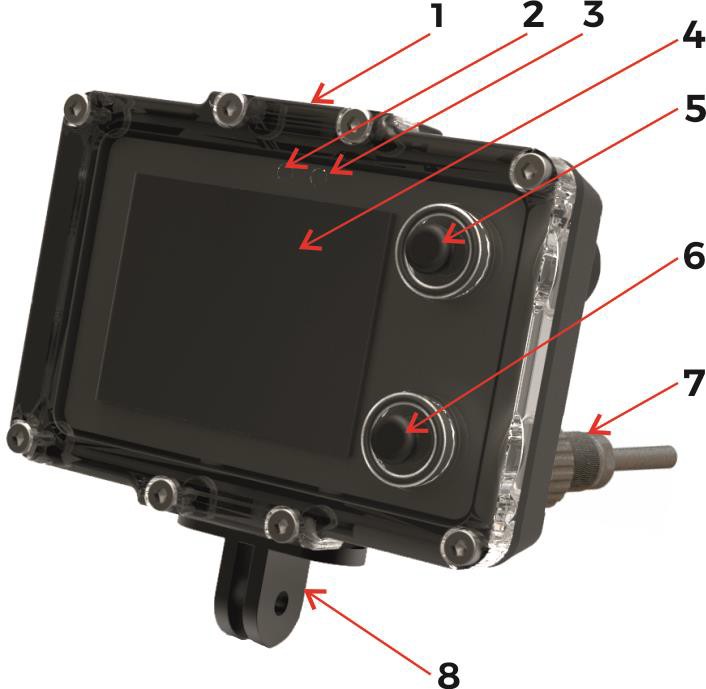 Fig. Beschreibung der Elemente
Fig. Beschreibung der Elemente
- Universalhalterung – Oberseite
- Umgebungslichtsensor (nicht verdecken)
- Zusatz-LED (Rot)
- Bildschirm/Anzeige
- Obere Taste (WEITER)
- Untere Taste (EINSTELLEN, AUFNAHME, HALTEN)
- EXTERNER ANSCHLUSS – Zum Aufladen und für Geschwindigkeitssensor
- Universalhalterung – Unterseite
Steuerung
Tastenfunktionen (je nach Bildschirminhalt):
Obere Taste (5)
NÄCHSTER Bildschirm, NÄCHSTES ELEMENT, Änderung RÜCKGÄNGIG, ZURÜCK
Untere Taste (6)
EINSTELLEN, Wert ändern, Änderung auswählen, Umschalten zwischen AUFNAHME/HALTEN
Dieser Hinweis bezieht sich auf die aktuelle Tastenfunktion. Mögliche Hinweise:
| Cursor/Auswahl nach unten zum nächsten Element bewegen | |
| Zum nächsten Bildschirm | |
| Zum vorherigen Bildschirm | |
| Aktuelles Element auswählen | |
| Abbrechen oder Löschen | |
| Wechsel zum nächsten verfügbaren Wert | |
| Erhöhen des aktuellen Werts um 1 |
Erste Schritte:Ein- und Ausschalten
Einschalten des Geräts
Tippen sie beide tasten gleichzeitig kurz an.
Das Gerät wird auch bei einer Mindest-Wassertiefe von 0,3 m (1 ft) eingeschaltet.
Ausschalten des Geräts
Sie müssen zunächst die Aufzeichnung ausschalten. Wechseln Sie dann zu MENU (drücken Sie im Hauptbildschirm 3 x die obere Taste und dann 1 x die untere Taste). Ist der Befehl OFF ausgewählt, drücken Sie die untere Taste.
Das Gerät wird automatisch ausgeschaltet, wenn die Tauchtiefe weniger als 0,5 m beträgt und die Aufzeichnung deaktiviert ist (HOLD).
Tastenbedienung
dd
Dies sind extra entwickelte piezoelektrische Module, die in eine dicke Polycarbonatscheibe eingelassen sind. Die Darauf angebrachten Gummitasten unterstützen lediglich bei der Bedienung (z. B. mit dicken Handschuhen).
Die Entwicklung einer nicht-magnetischen Lösung, die in einem großen Druckbereich (bis zu 300 m Wassertiefe) sicher funktioniert, ist keine einfache Aufgabe, wenn man Zuverlässigkeit und Einfachheit anstrebt. Daher sollten Sie sich zunächst mit der Bedienung dieser Tasten vertraut machen, da sich die Bedienung der ENC3 möglicherweise von der Bedienung anderer computergesteuerter Geräte unterscheidet, die Sie bereits kennen.
Beim Tauchen verändert sich der Wasserdruck um das Gerät herum permanent und in der Regel langsam. Aus diesem Grund können die Tasten nicht auf LANGSAME Bedienung ausgelegt werden. Die Tasten können also nur durch SCHNELLE Bewegungen aktiviert werden. Daher haben wir die Tasten so programmiert, dass sie auf schnelles „Antippen“ und weniger auf „Drücken“ reagieren.
Betriebsmodi
Normaler Betrieb
Standardmodus nach dem Einschalten Der Benutzer kann die aktuellen Tauchgangsparameter einsehen, die Aufzeichnung einschalten (ON (REC)) und ausschalten (OFF (HOLD)), Einstellungen verändern und den Inhalt des Gerätespeichers anzeigen lassen. Der Benutzer kann die aktuellen Tauchgangsparameter einsehen, die Aufzeichnung einschalten (ON (REC)) und ausschalten (OFF (HOLD)), Einstellungen verändern und den Inhalt des Gerätespeichers anzeigen lassen.
Auflademodus
Nach dem Anschließen des Geräts an eine Stromquelle wird der Aufladebildschirm angezeigt. In diesem Modus sind die Tasten nicht aktiv. Dieser Modus wird beendet, wenn der Akku vollständig aufgeladen ist oder die Verbindung zur Stromquelle unterbrochen wird.
Wartungsmodus
Wurde ein Software-Update angefordert, wechselt das Gerät in diesen Modus. Der Bildschirm ist leer, und die LED über dem Display blinkt. Dieser Modus wird nach maximal 1 Minute automatisch beendet.
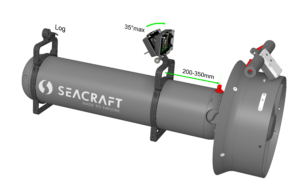
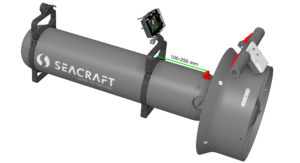
Richtlinien zur Befestigung der Konsole an einem Scooter
Wenn Sie die Navigationskonsole zusammen mit einem Unterwasser-Scooter verwenden, wählen Sie den Befestigungspunkt mit Sorgfalt. Eine ungünstige Platzierung kann dazu führen, dass Scooter-Teile (Akku, Motor) den Kompasssensor der Navigationskonsole beeinflussen.
Bei einem SEACRAFT® Scooter sollten Sie die nachfolgenden Positionen für Navigationskonsole und Geschwindigkeitssensor wählen:
EINSCHRÄNKUNGEN:
- Die ENC3 muss mindestens 0,2 m (7,9”) von allen Gegenständen entfernt sein, die ferromagnetisches Material (Motor, Akku), Dauermagnete (Motor, Steuergriffe, Geschwindigkeitssensor) oder elektrische Leiter enthalten, die den Akku mit dem Motor verbinden. Wird diese Regel nicht beachtet, können die Kompassanzeigen abweichen.
- Es wird empfohlen, den Seacraft-Transportgriff als Montageplattform zu nutzen. Dieser ermöglicht eine flachere Neigung des Displays und hält die Konsole dennoch in der Blickachse des Tauchers. Er sorgt für den erforderlichen Abstand zur Scooter-Hülle und zu den Elementen im Inneren (Kabel, Akku), die den Kompass beeinflussen können. Dies trifft vor allem bei GHOST-Modellen zu, bei denen der Akku eher in der Mitte liegt.
- Die Kompassanzeigen können instabil sein, wenn die ENC3 um mehr als 35° (aus der Vertikalen) geneigt ist (Installationswinkel). Wenn Sie außerdem die Scooter-Lage berücksichtigen, sollten Sie die ENC nicht mehr als 35° zum Scooter-Korpus neigen (siehe Abbildung oben).
- Platzieren Sie den Sensor nicht in der Nähe von Elementen, die die Wasserströmung unterbrechen können. Die Scooter-Vorderseite ist nahezu immer die beste Option. Beachten Sie die „Saugwirkung“ des Propellers, und vermeiden Sie die Platzierung im Bereich des Wassereinlasses.
Wenn Sie die ENC3 auf einem anderen Unterwasserfahrzeug platzieren möchten, müssen Sie die optimale Montageposition selbst ermittelt.Hierzu können Sie die Abbildung oben als Referenz verwenden.
Zur Wahrung der Kompassgenauigkeit wird empfohlen, den Kompass vor jedem Tauchgang zu kalibrieren. Die vom Kompass angezeigte Richtung wird mithilfe eines Magnetometers ermittelt, dass das Magnetfeld der Erde misst. Diese Bezugsgrößen verändern sich je nach Standort, lokalen geografischen Bedingungen (z. B. bei Vorhandensein ferromagnetischer Mineralien und unterliegen periodischen Veränderungen. Große ferromagnetische Elemente, z. B. Schiffswracks, eine Hafenmole aus Stahlbeton oder vergrabene Stahlelemente, wirken sich ebenfalls stark auf die Funktion des Kompasses aus.
Ein schlecht kalibrierter Kompass oder die Störung des Kompassbetriebs können zu erheblichen Abweichungen führen. Im Fall einer 1 km langen Route kann ein Kompassfehler von 5 Grad zu einer Berechnungsabweichung von nahezu 88 m führen.
Zu beachten ist hierbei auch die Differenz zwischen der vom Magnetkompass angezeigten Richtung und der auf der Karte ablesbaren geografischen Richtung. Die Differenz zwischen diesen beiden Kursen wird als magnetische Deklination bezeichnet und variiert je nach Standort. Bei der ENC3 können Sie diese magnetische Deklination einstellen und so die Abweichung ausgleichen.
Zur optimalen Nutzung des Geräts sollten Sie sich ausführlich mit der Theorie und den Grundlagen der Navigation beschäftigen.
Der Geschwindigkeitssensor ist ein präzises elektromechanisches Gerät, das vor mechanischer Beschädigung und Kontamination geschützt werden muss. Es wird empfohlen, den Sensor nach dem Tauchgang mit sauberem Süßwasser zu spülen um alle pflanzlichen und mineralischen Rückstände zu entfernen. Alle Messungen müssen mit höchster Präzision erfolgen.Daher wird empfohlen, den Geschwindigkeitssensor vor jedem Tauchgang zu kalibrieren.
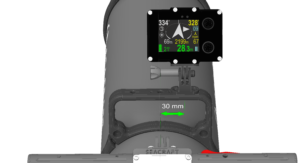
Weitere Hinweise zur Montage
Wenn Sie die ENC für sehr detaillierte Aufzeichnungen verwenden möchten, z. B. im Rahmen einer Vermessung, steht eine weitere Möglichkeit zur Feinjustierung zur Verfügung.
Die ENC IMU (Inertial Measurement Unit) befindet sich in der linken oberen Ecke. Diese Position wurde gewählt, um alle möglichen internen Störungen zu vermeiden. Umfassende Tests haben gezeigt, dass sich durch die Positionierung der IMU in der Rotationsachse die Datenqualität steigern lässt. Dies gilt vor allem für Anwendungen, bei denen selbst 0,5 % mehr Genauigkeit von Bedeutung sind.
Hierzu kann die Platzierung der ENC wie in der Abbildung unten gezeigt, nach links oder rechts verschoben werden. Mithilfe von speziellem Zubehör, das wahrscheinlich Ende 2022 verfügbar sein wird, lässt sich diese Positionierung an allen Seacraft-Transportgriffen realisieren.

Installation an Unterwasserfahrzeugen anderer Hersteller.
Soll die ENC3M an Unterwasserfahrzeugen anderer Hersteller verwendet werden, wenden Sie sich an den jeweiligen Hersteller, um die Art und Position der Installation und die Vorgehensweise zu ermittelt.
Zur Wahrung einer guten Kompassgenauigkeit wird empfohlen, den Kompass vor dem Tauchen in einem neuen Gebiet zu kalibrieren. Die Kompassrichtung wird durch Messung von drei Komponenten des Erdmagnetfelds ermittelt. Die Eigenschaften des Erdmagnetfelds variieren je nach geografischem Standort und lokaler Bodenbeschaffenheit (z. B. Eisengehalt). Außerdem unterliegen Sie im Laufe der Zeit konstanten, langsamen Veränderungen. Beachten Sie, dass große Stahlstrukturen (Wracks, Stahlbeton etc.) den Kompass erheblich beeinflussen können.
Ein falsch kalibrierter Kompass kann zu erheblichen Fehlern bei der Positionsbestimmung führen. Bei einer Entfernung von 1 km führt beispielsweise eine Kompassabweichung um 5 Grad zu einem Versatz von 88 m zum geplanten Ziel.
Achten Sie auf den Unterschied zwischen dem magnetischen Pol der Erde (dieser wird – vereinfach gesagt – durch den Kompass angezeigt) und dem geografischen Pol (an dem Karten ausgerichtet sind). Dieser Unterschied wird als magnetische Deklination bezeichnet und ändert sich je nach Breitengrad, Längengrad und im Laufe der Zeit. Die ENC ermöglicht die Berücksichtigung der magnetischen Deklination in Form einer permanenten Korrektur, deren Wert anhand aktueller Daten und des Standorts überprüft werden muss.
Zur korrekten Verwendung der ENC wird empfohlen, sich mit den Grundlagen der Navigation vertraut zu machen.
Der Geschwindigkeitssensor ist ein präzises und empfindliches elektromechanisches Element. Schützen Sie ihn vor Störfaktoren, wie mechanischen Stößen und Verschmutzung. Es wird empfohlen, den Geschwindigkeitssensor nach jedem Tauchgang unter einem schwachen Süßwasserstrahl zu spülen. Auf diese Weise wird die Langlebigkeit des Geräts gewahrt. Die Eigenschaften des Geschwindigkeitssensors können sich im Laufe der Zeit leicht verändern. Dies gilt besonders dann, wenn der Sensor unter widrigen Bedingungen eingesetzt wurde. Überprüfen Sie regelmäßig die Korrektheit der Sensorwerte, oder führen Sie eine Kalibrierung durch.
Die besten Kalibrierungsergebnisse erzielen Sie bei einer Kalibrierung des Geräts unter Wasser während des am Scooter befestigt ist. Diese Vorgehensweise erfordert ggf. weitere Ausbildungen.
Fehlerbehebung
|
Symptom |
Ursache |
Lösung |
|
Das Gerät kann nicht eingeschaltet werden. Das Display ist leer, und das Gerät reagiert nicht. |
Der Akku wurde übermäßig entladen. |
Laden Sie den Akku mindestens 30 Minuten lang auf, bevor Sie das Gerät einschalten. Nach einigen Minuten beginnt die rote LED, zu blinken. |
|
Ein defektes Gerät (geflutet, falsch aufgeladen) reagiert beim Aufladen nicht. |
Das Gerät muss zur Wartung eingesendet werden. |
|
|
Das Gerät schaltet sich fortlaufend ein und aus. |
Möglicherweise ist einer der internen Sensoren beschädigt. |
Verbinden Sie das Gerät für eine Minute mithilfe des Ladekabels mit einer Stromquelle. Wenn dies keine Abhilfe schafft, warten Sie, bis der Akku entladen ist, sodass sich das Gerät ausschaltet. Warten Sie eine Stunde, und versuchen Sie erneut, das Gerät aufzuladen. Wenn dies keine Abhilfe schafft, senden Sie das Gerät zur Reparatur ein. |
|
Beim Einschalten wird die Meldung „Akku-Ladestand niedrig!“ angezeigt, und das Gerät schaltet sich aus. |
Der Akku wurde zu sehr entladen. |
Laden Sie den Akku auf. |
|
Der Aufladevorgang endet nicht. Der Ladezustand des Akkus erreicht nie 90 %. |
Der Akku ist defekt. |
Senden Sie das Gerät zur Reparatur ein. |
|
Das Ladekabel ist defekt, oder der Stecker ist verschmutzt/korrodiert. |
Reinigen Sie den Stecker des Ladekabels. Stellen Sie sicher, dass das Kabel unbeschädigt ist. |
|
|
Die Ladestromquelle ist zu schwach. |
Versuchen Sie es mit einem anderen Ladekabel. Sie können zum Aufladen den USB-Anschluss eines Laptops/PCs verwenden. |
|
|
Die Tiefenanzeige bleibt bei 0 stehen. Die angezeigte Tiefe ist nicht korrekt. Das Gerät schaltet sich beim Eintauchen in das Wasser nicht automatisch ein. |
Der Drucksensor ist defekt. |
Wechseln Sie zu ‘Settings / Pressure/Salin‘. Beträgt der Druck nahezu 0, ist der Sensor defekt und muss beim Hersteller ausgetauscht werden. |
|
Der Drucksensorspalt ist verschmutzt. |
Spülen Sie das Gerät vorsichtig mit warmem Süßwasser ab, bis das Problem behoben ist. |
|
Der Geschwindigkeitssensor ist angeschlossen, aber die Geschwindigkeit wird nicht angezeigt. |
Der Sensorstecker ist nicht richtig angeschlossen, defekt oder korrodiert. |
Ziehen Sie den Sensorstecker ab, spülen und/oder reinigen Sie den Stecker, und schließen Sie ihn wieder an. |
|
Das Gerät wird in den Modus INERTIAL umgeschaltet. |
Wechseln Sie zu ‘Settings / Log/Speed‘, und stellen Sie sicher, dass die Option ‘EXT‘ auf ‘Active Log’ gesetzt wurde. |
|
|
Der Kompass zeigt die falsche Richtung an. |
Kalibrierung erforderlich. |
Führen Sie die Kalibrierung gemäß Kapitel 13.1 und 13.2 durch. |
|
Starkes Magnetfeld in der Nähe des Geräts. |
Entfernen Sie nach Möglichkeit die magnetischen und ferromagnetischen Elemente aus dem Umfeld des Navigationsgeräts. Verlagern Sie das Navigationsgerät an eine andere Position. |
|
|
Sensor defekt. |
Senden Sie das Gerät zur Reparatur ein. |
|
|
Der Kompasssensor wurde überlastet. |
Schalten Sie das Gerät aus. Warten Sie 10 Sekunden lang. Schließen Sie dass Ladegerät für 10 Sekunden an. Prüfen Sie das Kompassverhalten erneut. |
Vor jedem Tauchgang …
Stellen Sie sicher, dass der Akku ausreichend aufgeladen ist. Schalten Sie das Gerät ein, und prüfen Sie alle wichtigen Einstellungen.
Wenn Sie den Sensor mit dem Gerät verbinden möchten, prüfen Sie den Zustand von Stecker und Anschlussbuchse, entfernen Sie alle Verunreinigungen, tragen Sie eine dünne Silikonschicht auf die Dichtungen auf, und ziehen Sie den Stecker vorsichtig handfest.
Prüfen Sie vor dem Tauchgang, ob der Stecker auf der Rückseite fest mit dem Gerät verbunden ist.
Stellen Sie außerdem sicher, dass keiner der Dichtungsringe beschädigt ist oder fehlt.

So bringen Sie den Stecker richtig an:
- Drücken Sie den Stecker bis zum Anschlag in die Buchse.
- Drehen Sie den Stecker im Uhrzeigersinn, bis Sie einen Widerstand spüren.