[WORDPRESS_PDF]
Wenn Sie die untere Taste (ENTER) drücken, während die Option MENU im → Bildschirm für weitere Informationen hervorgehoben wird (siehe Abb. 4), können Sie zwischen 4 Befehlen wählen:
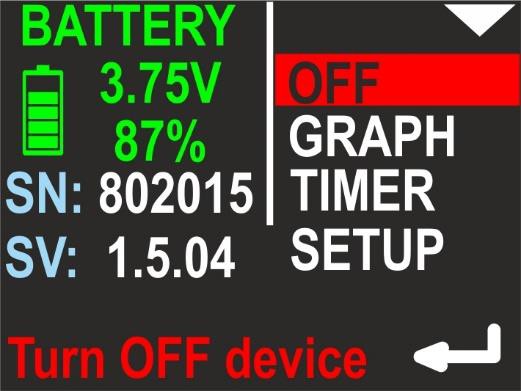
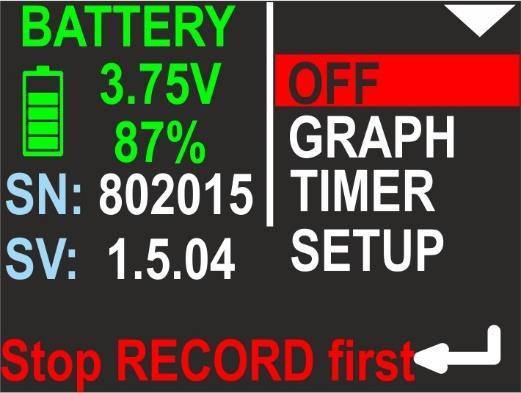
OFF
Ermöglicht das Ausschalten des Geräts. Auf der linken Bildschirmseite werden Informationen zum aktuellen Akku-Ladezustand angezeigt. Darunter sehen Sie die Seriennummer des Geräts (SN, eindeutige Gerätekennung) und die interne Software-Version (SV):
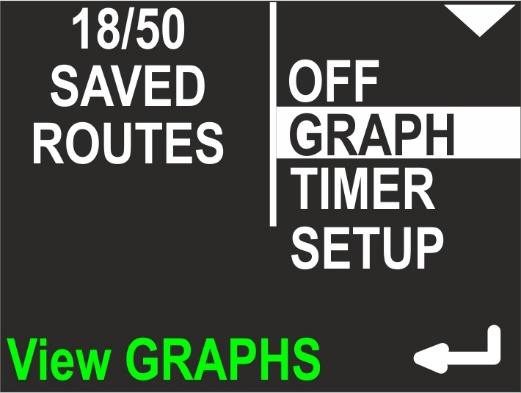
GRAPH
Ermöglicht das Anzeigen von Diagrammen zu Position und Tauchtiefe auf dem Display. Weitere Informationen und Diagramme finden Sie in Kapitel 9 und 10. Auf der linken Bildschirmseite werden 2 Zahlen angezeigt: Anzahl gespeicherter Routen/maximale Routenanzahl im Speicher.
Weitere Informationen zur Speicherorganisation finden Sie → hier.
Tiefenprofil-Diagramm
Wenn Sie die untere Taste (ENTER) drücken, während die Option GRAPH im Bildschirm MENU hervorgehoben ist, gelangen Sie zum einfachen Diagramm-Browser. Das erste verfügbare Diagramm ist das Tiefenprofil.Es enthält eine Darstellung der Tauchtiefe in Relation zur Tauchzeit:
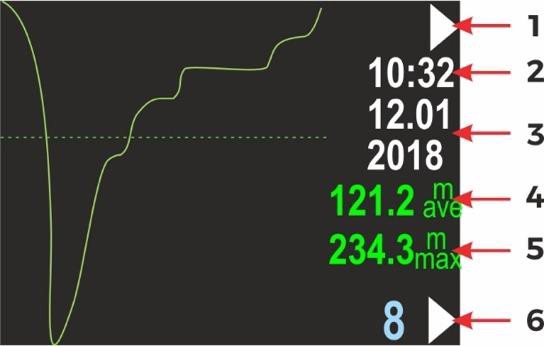
- Funktion der oberen Taste (jetzt – nächstes Diagramm:Tauchrichtungsdiagramm)
- Zeitpunkt der ersten Datenaufzeichnung (hh:mm, 24–Stunden-System)
- Datum der ersten Datenaufzeichnung (TT.MM / JJJJ)
- Durchschnittliche Tauchtiefe (sofern ermittelbar)
- Maximale Tauchtiefe (sofern ermittelbar)
- Routen-Speicherplatz (Blau) und Funktion der unteren Taste
(jetzt – Wechsel zur nächsten Route)
Bewegungsdiagramm
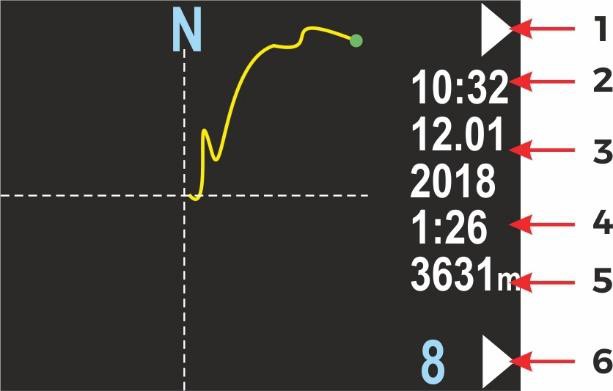
Dieser Bildschirm enthält die Veränderungen der Taucherposition, projiziert auf eine Ebene
(wie auf einer Karte). Der Ausgangspunkt der Route befindet sich stets in der Mitte des Bildschirms.
Der Endpunkt der Route wird als grüner Punkt dargestellt, allerdings nur bei der aktuellen Route.
An der rechten Bildschirmseite finden sich einige Informationselemente:
- Funktion der oberen Taste (jetzt – weiter zum nächsten Bildschirm:Zurück zum Hauptmenü)
- Zeitpunkt der ersten Datenaufzeichnung (hh:mm, 24–Stunden-System)
- Datum der ersten Datenaufzeichnung (TT.MM / JJJJ)
- Gesamt-Aufzeichnungsdauer in Minuten (bei mehr als zwei Stunden wird dieser Wert in Stunden angegeben).Dieses Feld kann leer sein, wenn der Wert nicht ermittelt werden kann (leerer Datensatz).
- Gesamtstrecke in Metern (über 2000 m in Kilometern).Dieses Feld kann leer sein, wenn der Wert nicht ermittelt werden kann (leerer Datensatz).
- Routen-Speicherplatz (Blau) und Funktion der unteren Taste
(jetzt – Wechsel zur nächsten Route)
Das Gerät kann nach links oder rechts geneigt werden, um die Tastenfunktionen für diesen Bildschirm zu ändern. Wird das Gerät nach links geneigt, ermöglicht die untere Taste den Wechsel zur vorherigen Routennummer. Wird das Gerät nach rechts geneigt, ermöglicht die untere Taste das Löschen der aktuellen Route. Wird das Gerät nach links geneigt, ermöglicht die obere Taste den Wechsel zum vorherigen Diagramm (Tiefenprofil). Dies kann in beiden Diagrammbildschirmen genutzt werden:
Gerät wird nach links geneigt
| Obere Taste | Untere Taste | |
| Vorheriger Bildschirm | Nächster Bildschirm | |
| Nächster Bildschirm | Nächste Route | |
 | Nächster Bildschirm | Nächste Route |
TIMER
Ermöglicht das Starten, Stoppen und Löschen der internen Stoppuhr.
Die Stoppuhr wird nachfolgend erläutert.
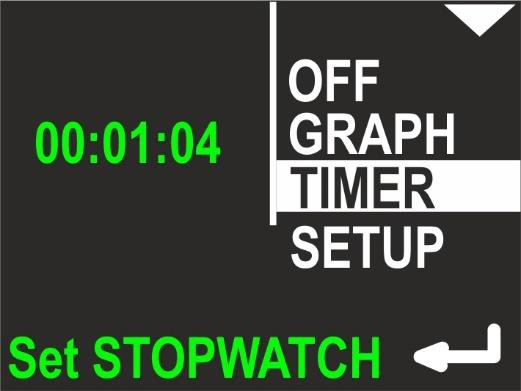
Stoppuhr
Wenn Sie die untere Taste (ENTER) drücken, während die Option TIMER im Bildschirm MENU hervorgehoben wird, gelangen Sie zum Bildschirm TIMER/STOPWATCH:
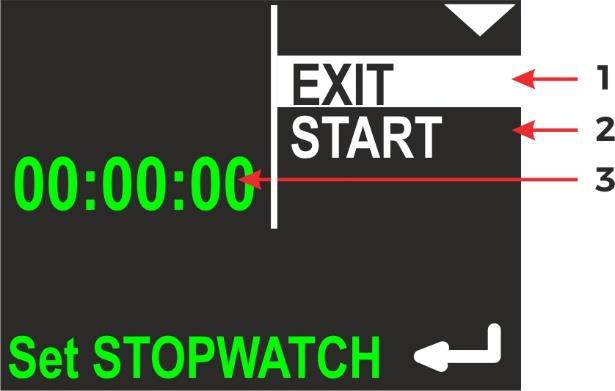

- EXIT – derzeit ausgewählte Option.Wenn Sie die untere Taste (ENTER) drücken, kehren Sie zum Navigations-Hauptbildschirm zurück.
- Timer START – Option zum Starten von TIMER/STOPPUHR zur Zeitmessung
- Aktueller Wert von TIMER/STOPPUHR (hh:mm:ss – Stunden:Minuten:Sekunden)
- Timer STOP – Option zum Stoppen von TIMER/STOPPUHR
- Timer CLEAR – Option zum Löschen von TIMER/STOPPUHR
Wurde TIMER/STOPPUHR aktiviert, existieren Optionen zum Stoppen und Löschen.
STOP ändert den Wert von TIMER/STOPWATCH nicht (Sie können die Zeitmessung fortsetzen oder neu starten). CLEAR setzt den Wert von TIMER/STOPWATCH auf 00:00:00 zurück, aber die Stoppuhr wird mit diesem Befehl nicht automatisch angehalten.
SETUP
Ermöglicht das Anzeigen und Ändern aller internen Konfigurationsparameter.
Die Geräte-Einstellungen werden in zwei Bildschirme gegliedert. Die ausgewählte Funktion wird hervorgehoben.
Die obere Taste (NEXT) wechselt zur nächsten Funktion (unten).
Die untere Taste (ENTER) aktiviert die ausgewählte Option.
Auf der linken Bildschirmseite werden die wichtigsten Einstellungen in Kurzform angezeigt (um ein unnötiges Aktivieren der Konfiguration zur Überprüfung zu vermeiden).
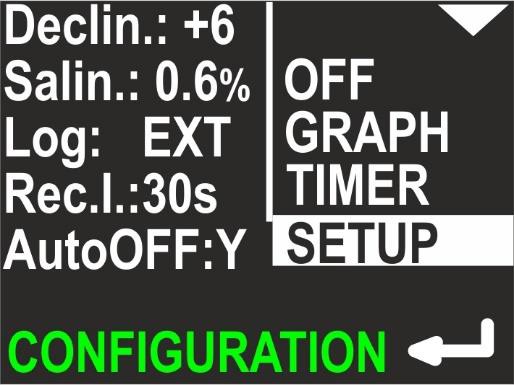
Wenn Sie die untere Taste (ENTER) drücken, während die Option SETUP im Bildschirm MENU hervorgehoben wird, gelangen Sie wieder zum Menü SETUP.
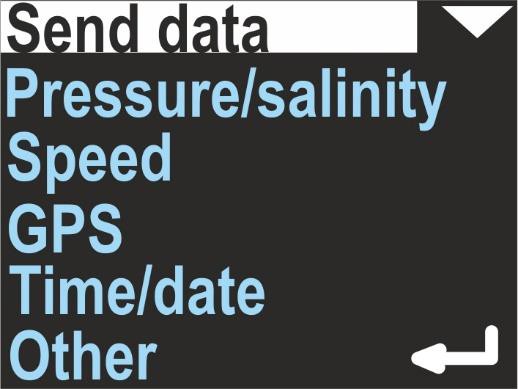
Send data
Aktiviert die interne Bluetooth-Übertragung und ermöglicht eine USB-Verbindung.
Aktivieren Sie diese Option vor der Übertragung von Daten vom Navigationsgerät auf einen PC oder auf ein Smartphone. Ist diese Funktion aktiviert, wird das Gerät nicht automatisch ausgeschaltet (sofern die Akkukapazität nicht erschöpft ist).
Im Modus für die Datenübertragung sieht der Gerätebildschirm wie folgt aus:
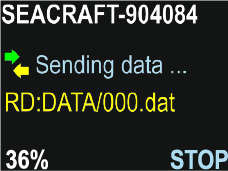
In der ersten Zeile wird der Gerätename angezeigt.Diesen Namen sehen Sie auch in der Bluethooth-Umgebung.
Die grünen und gelben Pfeile werden grau, wenn die Verbindung unterbrochen wurde.
Gelber Text beschreibt den aktuellen Vorgang (RD = Reading (Lesen), dann der Dateiname).
In der linken unteren Ecke sehen Sie die Fortschrittsanzeige in %.
Sie können die Kommunikation durch Drücken der unteren ENC3-Taste (STOP) jederzeit abbrechen.
Pressure/Salinity
Zeigt den aktuellen Umgebungsdruck in Millibar an (grün). 1 PSI ≈ 68,95 Millibar
Wird kein Druck angezeigt, ist der Drucksensor defekt.
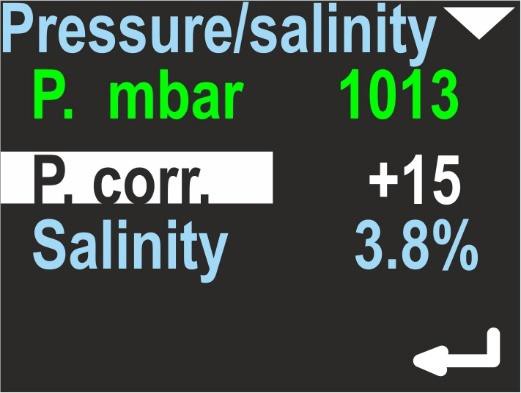
In der unteren Zeile wird die Druckkorrektur (weiß) angezeigt. Dieser Wert wird zum gemessenen Druckwert addiert.Dies hat keine Auswirkungen auf die Tiefenberechnung, aber der Wert wird zum oben angezeigten Druckwert hinzugefügt, damit der Benutzer dieses Gerät als Präzisionsbarometer kalibrieren kann.
In der letzten Zeile kann die Wasser-Salinität von 0,0 % (Süßwasser) bis 4,0 % eingestellt werden.
Dieser Koeffizient wirkt sich auf die Umrechnung von Druck in Tiefenangaben aus und sollte daher korrekt eingestellt werden.
Ist dieses Element hervorgehoben, kann dessen Wert durch Drücken der unteren Taste bearbeitet werden.
Geschwindigkeit
Die Navigationskonsole kann mit einem externen Sensor (Geschwindigkeitssensor) zusammenarbeiten, aber auch der eigenständige Betrieb (Trägheitsmodus) ist möglich. Mit dieser Option kann zwischen den beiden Modi hin- und hergewechselt werden.
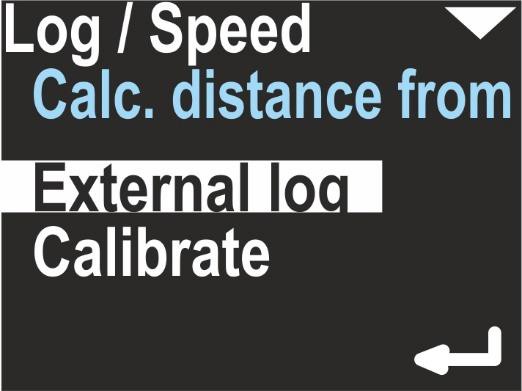
Das Feld ‘Calc. distance from’ (Entfernung berechnen von) kann dabei zwischen ‘External log’ (Externer Sensor) und ‘Const.Speed’ (Konstante Geschwindigkeit) wechseln.
Für den ersten Wert muss ein externer Geschwindigkeitssensor angeschlossen werden.
Ist dieser Modus ausgewählt, wird auf der rechten Seite des Navigations-Hauptbildschirms das folgende Symbol angezeigt:
Die Option ‘Calibrate’ (Kalibrieren) kann den Koeffizienten ändern, der zur Umwandlung von Sensorimpulsen in Geschwindigkeits- und Entfernungswerte verwendet werden:
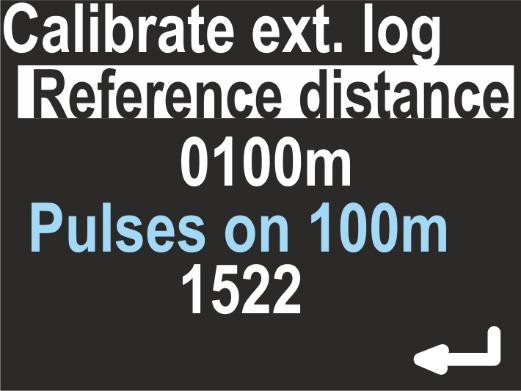
Wenn Sie den Sensor neu kalibrieren möchten, stellen Sie die gewählte Entfernung (Referenzentfernung) in Metern ein.Drücken Sie hierzu die untere Taste, und ändern Sie den Wert Ziffer für Ziffer.
Anschließend werden Sie zur nächsten Option geleitet. Diese gibt an, wie viele Impulse auf eine Entfernung von 100 m entfallen.Wenn Sie die untere Taste drücken, beginnt eine neue Kalibrierung:

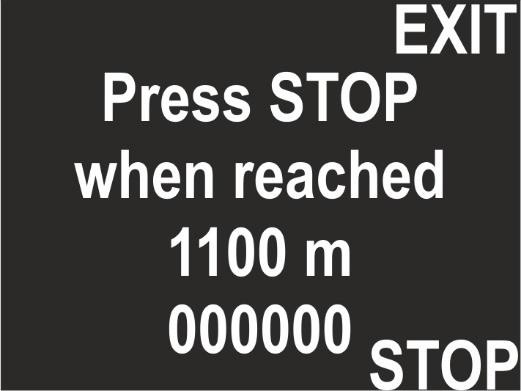
Wählen Sie START, und bewegen Sie sich auf geradem Weg ohne Tiefenänderung, bis Sie die gewählte Entfernung zurückgelegt haben. Wählen Sie dann STOP.Auf dem Bildschirm sehen Sie, wie viele Impulse gezählt wurden.
Wurden keine Impulse aufgezeichnet, wird die Kalibrierung verworfen.
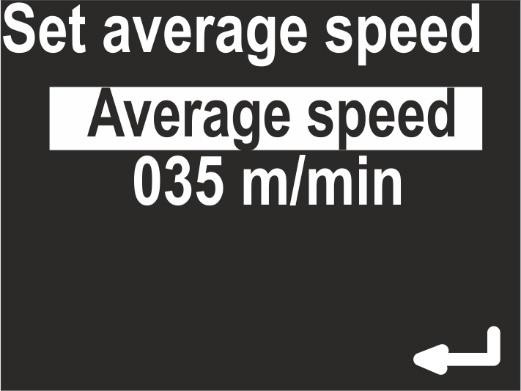
Wird ‘Calc. distance from’ (Entfernung berechnen von) auf ‘Const.Speed’ (Konstante Geschwindigkeit) eingestellt.Wird eine konstante Durchschnittsgeschwindigkeit eingestellt, um die Position zu berechnen (im Hauptbildschirm wird kein Symbol angezeigt).
Mit der Option ‘Calibrate’ (Kalibrieren) können Sie eine konstante Durchschnittsgeschwindigkeit einstellen, um die aktuelle Position, die Rückkehrdauer und die Dauer bis zum Ziel zu berechnen.
Log/Speed Calibration
Der Betrieb der ENC3 mit und ohne externen Geschwindigkeitssensor weist Unterschiede auf. Daher hat auch die Option ‘Calibrate’ (Kalibrieren) je nach Sensoreinstellungen verschiedene Aufgaben.
Wird der externe Geschwindigkeitssensor nicht verwendet (Calc. distance from = Const. speed), besteht die Kalibrierung in der Auswahl einer Durchschnittsgeschwindigkeit. Befindet sich das Gerät im Status HOLD, verändert sich der Entfernungszähler nicht. Versetzt der Benutzer das Gerät in den Status RECORD (AUFZEICHNUNG) , geht die Navigationskonsole davon aus, dass sich der Taucher mit einer konstanten Geschwindigkeit fortbewegt, der dem in dieser Option definierten Wert entspricht (z. B. 50 m/min).
Diese Betriebsart erfordert vom Benutzer folgende Mitarbeit:
- Möglichst genaues Festlegen der durchschnittlichen Geschwindigkeit
- Einhalten der konstanten Geschwindigkeit
- Möglichst schnelles Umschalten zwischen HOLD (HALTEN) und RECORD (AUFZEICHNEN) zu Beginn/zum Ende der Fortbewegung
Ist der externe Geschwindigkeitssensor mit dem Gerät verbunden, und wird er eingesetzt (Calc. distance from = External log), dient die Kalibrierung dazu, eine optimale Entfernungsmessung zu erhalten.
Der Betrieb mit Sensor basiert auf dem Zählen von Impulsen. Der Sensor-Kalibrierungsfaktor entspricht der Anzahl von Impulsen, die der Geschwindigkeitssensor beim Zurücklegen einer Strecke von 100 m erzeugt.
Ein typischer Wert liegt z. B. bei 1590 Impulsen pro 100 m. In den meisten Fällen liegt dieser Wert zwischen 1400 und 1600 Impulsen auf 100 m.
Die Anzahl der Impulse kann je nach Scooter-Typ, Montageposition und externen Einflüssen („Propellereffekt“ etc.) variieren. Die ENC3 wurde zur Verwendung mit einem Seacraft-Scooter kalibriert, dessen Bauweise die optimale Platzierung des Sensors ermöglicht und Störungen minimiert. Während die werkseitige Einstellung zur allgemeinen Orientierung mit den meisten Scooter-Typen ausreicht, wird für präzisere Anwendungen (z. B. Kartografie) die Kalibrierung des Geschwindigkeitssensors bei voll ausgerüstetem Scooter empfohlen.
Dieser Kalibrierungswert hängt auch von der genauen Sensorposition am Scooter ab. Wenn Sie optimale Ergebnisse erzielen möchten, markieren Sie die Sensorposition am Scooter, und führen Sie die Kalibrierung wie folgt durch:
- Markieren Sie den Anfangs- und Endpunkt an einer geraden Strecke mit bekannter Länge (100-1900 m).
- Wechseln Sie zu SETUP -> Log/Speed -> Calibrate log (stellen Sie sicher, dass Active log auf EXT gesetzt ist).
- Geben Sie die bekannte Kalibrierungsentfernung im Feld Log at:ein.
- Darunter sehen Sie den aktuellen Kalibrierungsfaktor Log 100m: 1590. Stellen Sie sicher, dass der Pfeil auf diese Zeile zeigt, und drücken Sie die untere Taste.
- In diesem Bildschirm sehen Sie die Meldung Press START and swim exactly …. m (Drücken Sie START, und legen Sie genau …M zurück).
- Begeben Sie sich zum Anfangspunkt, stellen Sie die Scooter-Geschwindigkeit ein, wählen Sie START (untere Taste) an der Navigationkonsole aus, und begeben Sie sich in möglichst gerader Linie zum Endpunkt. Im Bildschirm sehen Sie den Impulszähler, dessen Wert während der Fahrt steigen sollte.
- Drücken Sie bei Erreichen des endpunkts erneut die untere Taste. Der neue Sensor-Kalibrierungsfaktor wird angezeigt.
Für die Kalibrierung muss die Entfernung in Metern eingegeben werden. Andere Maßeinheiten stehen nicht zur Verfügung.
1 N.M. (Nautische Meile, USA), entsprechend 852,0 m 100 Fuß entsprechen 30,48 m 100 Fuß entsprechen 30,48 m
100 m entsprechen 328,08 Fuß.
Der Kalibrierungswert kann auch eingestellt werden, ohne unter Wasser eine bekannte Entfernung zurückzulegen. Weist die aufgezeichnete Route eine Abweichung zur zurückgelegten Entfernung auf, ohne dass dies auf Strömungen oder falsche Montage/Sensorschäden zurückgeführt werden kann, lässt sich der korrekte Kalibrierungswert „f“ wie folgt berechnen:
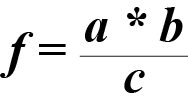
Hierbei gilt:
a = Länge des Abschnitts, wie mit der ENC3 gemessen
b = Aktueller Kalibrierungswert (Impulse / 100 m)
c = Exakt bekannte Länge des Abschnitts
Beispiel: Der gemessene Abschnitt ist genau 127 m lang, und die ENC3 hat eine Routenlänge von 124 m ermittelt. Der in die ENC3 eingegebene Kalibrierungsfaktor beträgt 1590 Impulse/100 m.
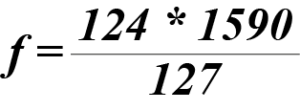
Das Ergebnis lautet 1555.
Haben Sie die Funktion zum Kalibrieren auf 100 m ausgewählt, drücken Sie START, und pusten Sie in den Geschwindigkeitssensor (bzw. verwenden Sie einen Haartrockner mit kalter Luft), bis der Wert 1555 angezeigt wird. Drücken Sie dann STOP. Der korrigierte Kalibrierungswert wird gespeichert.Diese Vorgehensweise ist nicht kompliziert und nimmt nicht viel Zeit in Anspruch.
Diese Funktion kann von Nutzen sein, wenn verschiedene Sensorkonfigurationen verwendet werden und Sie unterschiedliche Kalibrierungswerte zu jedem Sensor notieren.
Derzeit sind 2 Arten von Geschwindigkeitssensoren erhältlich: Die klassische (Typ B) und die kompakte Version (Typ C). Zukünftig kommen evtl. weitere Versionen hinzu.
Wenn Sie einen klassischen Geschwindigkeitssensor verwenden, sollte ein Kalibrierungswert zwischen 1550 und 1600 ausreichen. Bei einem kompakten Sensor erzielen Sie mit 1600 bis 1650 Impulsen/100 m gute Ergebnisse.
GPS
Diese Menüoption dient nur der Information.
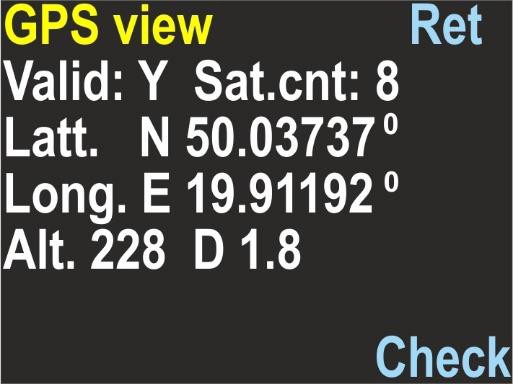
Ist diese Option ausgewählt, zeigt der Navigationsbildschirm die nachfolgend beschriebenen GPS-Statusinformationen:
- Valid: Y/N (Gültig J/N) – Zeigt an, ob GPS-Informationen zur Verfügung stehen.
- Sat.cnt: 0…15 (Satellitenanzahl) – Anzahl der zur Positionsermittlung verwendeten Satelliten.
- Latt. N/S 0.00000° (Breite N/S) – Breite in Grad N(ord) oder S(üd)
- Long. E/W 0.00000° (Länge O/W) – Länge in Grad,E(ast, Ost) oder W(est)
- Alt. 0.0 (Höhe) – Höhe über dem Meeresspiegel in Metern
- D 0.0 (Abweichung) – Horizontale Abweichung in Metern (je geringer, desto besser
Die GPS-Informationen werden automatisch bei jeder neuen Berechnung aktualisiert.
Der GPS-Status wird außerdem im Hauptbildschirm als Symbol angezeigt:
Der GPS-Empfänger wird ab einer Wassertiefe von 1,5 m (4,9 ft) automatisch deaktiviert, um Akkukapazität zu sparen. Bei einer Wassertiefe von 0,5 m (1,6 ft) oder weniger wird der GPS-Empfänger automatisch aktiviert.
Nach dem Einschalten des Geräts sollten die ersten GPS-Werte innerhalb von 20-60 Sekunden angezeigt werden. Die GPS-Antenne befindet sich zwischen den Tasten.Daher sollten Sie diesen Bereich nicht verdecken.
Sie können die Navigationskonsole eine Zeit lang mit dem Bildschirm nach oben halten, um bessere/schnellere GPS-Informationen zu erhalten.Dies ist jedoch in den meisten Fällen nicht erforderlich.
Time/Date
Das Gerät verfügt über eine interne Echtzeituhr mit Kalender.
Die Uhrzeit wird im 24-Stunden-Format angezeigt, das Datum im Format TAG.MONAT.JAHR. Die Jahreszahl wird nur mit zwei Ziffern dargestellt. Der Wert 01 steht also für das Jahr 2001, 02 steht für 2002 etc.

Weitere Einstellungen – Teil 1
Verschiedene weitere Einstellungen wurden in 2 separaten Bildschirmen zusammengefasst:
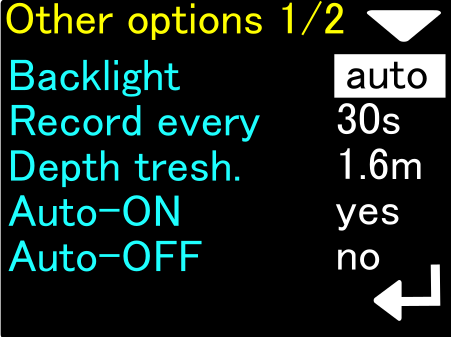
Backlight (Hintergrundbeleuchtung)
[1, 2, 3, 4, 5, auto] – Verändert die Intensität der Hintergrundbeleuchtung. Der Wert 1 steht für die geringste konstante Helligkeit (ca. 20 %), der Wert 5 steht für die konstante Maximalhelligkeit (ca. 95 %).Der Wert ‚Auto‘ bedeutet, dass die Hintergrundbeleuchtung mithilfe des Umgebungslichtsensors automatisch eingestellt wird.
Record every (Aufzeichnung alle…)
[2 s, 5 s, 10 s, 30 s] – Der maximal zulässige Zeitversatz zwischen zwei gespeicherten Aufzeichnungen. Beachten Sie, dass zwei Werte auch in einem kürzeren Abstand aufgezeichnet werden können, aber niemals in einem längeren.
Depth threshold (Tiefengrenzwert)
[0,5 m, 1 m, 5,6 m] – Die Navigationskonsole zeichnet die ‚Tauchgangsdauer’ auf, wenn die Tiefe mindestens diesem Wert entspricht.
Auto-ON (Auto-EIN)
[yes/no]) – Lautet der Wert ‘Yes‘, wird das Gerät automatisch eingeschaltet, wenn es mindestens 0,3 m (1 ft.) untergetaucht ist.
Auto-OFF (Auto-AUS)
[yes/no] – Lautet der Wert ‘Yes‘, wird das Gerät automatisch ausgeschaltet, wenn die Wassertiefe mindestens 0,5 m beträgt, RECORDING (AUFZEICHNUNG) deaktiviert ist (HOLD) und der Benutzer in den letzten 5 Minuten keine Taste gedrückt hat.
Weitere Einstellungen – Teil 2
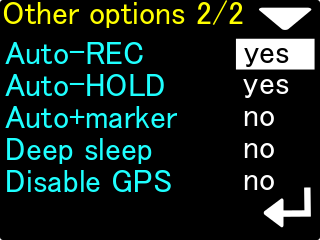
Auto-REC (Auto-AUFZEICHNUNG)
Diese Option ist standardmäßig aktiviert.
Ist „Auto-REC“ deaktiviert, verhält sich die ENC wie bei Verwendung der vorherigen Softwareversion. Der Benutzer muss die Datenaufzeichnung manuell starten (untere Taste im Hauptbildschirm mit der Kompassanzeige), um Informationen zu speichern.
Ist „Auto-REC“ aktiviert, erkennt die ENC-Konsole automatisch den richtigen Moment zum Starten der Datenaufzeichnung.
Die automatische Datenaufzeichnung beginnt, wenn alle der folgenden Bedingungen gleichzeitig erfüllt werden:
- Die ENC3 ist mindestens so weit untergetaucht, wie unter Depth tresh. angegeben (erster Bildschirm der weiteren Einstellungen).
- Der Geschwindigkeitssensor erkennt mindestens 1,2 Sekunden lang einen Wasserstrom von mindestens 8 m/min. Der Wasserstrom darf nicht unterbrochen werden (keine Geschwindigkeitsschwankungen).
- Aktuell wird der Hauptbildschirm der Konsole angezeigt (der Bildschirm mit dem großen Pfeilsymbol).
Die Option „Auto-REC“ ist nur für das automatische Starten der Datenaufzeichnung verantwortlich.
Auto-HOLD (Auto-HALTEN)
Diese Option ist standardmäßig aktiviert.
Ist „Auto-HOLD“ deaktiviert, funktioniert die ENC-Konsole wie zuvor. Der Benutzer muss die Datenaufzeichnung manuell stoppen (untere Taste im Hauptbildschirm mit der Kompassanzeige).
Ist „Auto-HOLD“ aktiviert, stoppt die ENC-Konsole die Datenaufzeichnung automatisch.
Die automatische Unterbrechung der Datenaufzeichnung erfolgt, wenn mindestens eine der folgenden Bedingungen erfüllt wird:
- Die von der ENC-Konsole ermittelte Tiefe beträgt 0,2 m oder weniger.
- Die vom Geschwindigkeitssensor ermittelte Geschwindigkeit beträgt weniger als 6 m/min und bleibt für mindestens 1,2 s bei diesem Wert (ohne plötzliches Beschleunigen).
Die Funktion „Auto-HOLD“ ist nur für das automatische Stoppen der Datenaufzeichnung verantwortlich und arbeitet unabhängig vom gerade angezeigten Bildschirm.
Auto+marker (Auto + Markierung)
Diese Option ist standardmäßig aktiviert.
Die ENC-Konsole verfügt über eine Funktion zum Speichern von Wegmarkierungen. Eine solche Markierung ist eine Hervorhebung eines Punkts auf einer aufgezeichneten Route. Standardmäßig speichert das Gerät bei jeder manuellen Unterbrechung der Aufzeichnung (mithilfe der Taste an der Konsole) die aktuelle Markierungsnummer, und erhöht den Markierungsnummer um 1, bis der Wert 99 erreicht ist.
Ist die Option „Auto+marker“ deaktiviert, werden Markierungen nur dann gespeichert, wenn Sie die Aufzeichnung manuell stoppen.
Ist die Option „Auto+marker“ aktiviert, führt das Stoppen der Aufzeichnung mit der Option „Auto-HOLD“ auch zum Speichern und Erhöhen der Markierungsnummer. Ist „Auto-HOLD“ deaktiviert, funktioniert „Auto+marker“ nicht.
Deep sleep
Diese Option ist standardmäßig aktiviert.
Die ENC-Konsole misst auch im ausgeschalteten Zustand regelmäßig den Umgebungsdruck.
Dieser Wert wird zur genauen Ermittlung der Tauchtiefe benötigt. Allerdings verringert selbst das kurzzeitige Aktivieren der Konsole den Ladezustand des internen Akkus, sodass auch eine vollständig aufgeladene ENC-Konsole nach 3-4 Monaten Lagerung aufgeladen werden muss.
Bei Aktivierung der Option „Deep sleep“ erfolgt keine regelmäßige Messung des Umgebungsdrucks.
Beachten Sie, dass dies in einigen wenigen Fällen die Genauigkeit der Tiefenmessung beeinträchtigen kann. Die maximale Fehlerrate der Tiefenmessung kann sich in diesem Fall auf 0,8 m erhöhen, während die Fehlerrate ohne Energiesparfunktion im Bereich von 0,2-0,4 m bleibt.
Mit der Option „Deep sleep“ lässt sich der Energieverbrauch der ENC-Konsole während des Herunterfahrens um den Faktor 2,5 verringern, sodass ein voll aufgeladenes Gerät ca. 9 Monate gelagert werden kann.
Disable GPS (GPS deaktivieren)
Diese Option ist standardmäßig aktiviert.
Die ENC-Konsole verfügt über einen interne GPS-Empfänger, der an der Wasseroberfläche fortlaufend aktiviert ist (ab einer Wassertiefe von 0,1 m und weniger). Der Betrieb des GPS-Empfängers verringert den Ladezustand des integrierten Akkus.
Unter Umständen kann die Konsole über einen längeren Zeitraum kein GPS-Signal empfangen (z. B. in einer Höhle).In diesem Fall wird durch den aktivierten Empfänger Energie vergeudet.
Ist die Option „Disable GPS“ aktiv (yes), bleibt der GPS-Empfänger unabhängig von der Wassertiefe dauerhaft ausgeschaltet. Auf diese Weise verlängert sich die Betriebsdauer der ENC-Konsole an der Wasseroberfläche um ca. 20 %.
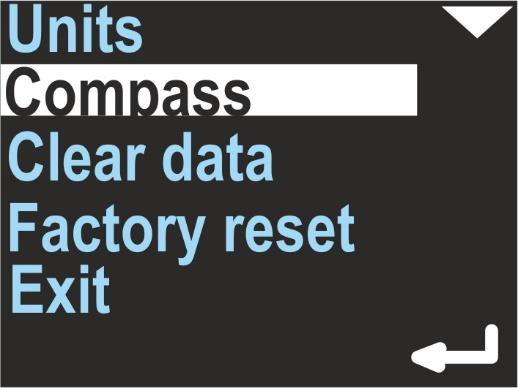
Units (Einheiten)
Ermöglicht das Auswählen der Maßeinheiten für die angezeigten Werte:
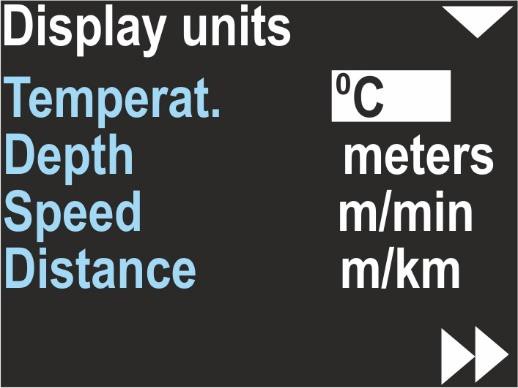
Temperat.(ure) (Temperatur)
Kann °C (Celsius) oder °F (Fahrenheit) sein.
Depth (Tiefe)
Kann Meter oder Fuß sein.
Geschwindigkeit
Kann m/min (Meter pro Minute) oder Knoten (nautische Meilen pro Stunde) sein.
Distance (Entfernung)
Kann m/km (Meter und über 2000 m = Kilometer) bzw. US.NM (United States Nautical Mile, 1 US.NM = 1852 m) sein.Die gewählte Einheit wird in der Regel in allen anderen Bildschirmen neben dem Wert angezeigt.
Compass (Kompass)
Ermöglicht das Kalibrieren des Magnetometers (des Kompasses), sowie das Einstellen der magnetischen Deklination und Abweichung). Eine weiße Hervorhebung markiert das gerade ausgewählte Element.
Auf der linken Seite sehen Sie eine Textbeschreibung der Funktion/des Parameters.
Auf der rechten Seite sehen Sie Informationen zur Funktion oder zum Parameterwert.
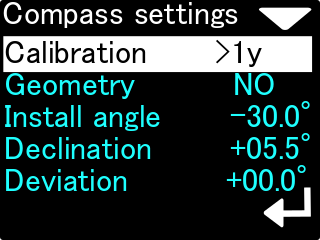
Da dieses Thema eine ausführliche Erläuterung erfordert, finden Sie weitere Informationen im separaten Artikel zu dieser Option.
Clear Data
Löscht alle Einträge aus dem internen Speicher. Der Benutzer wird gefragt, ob er dies wirklich tun möchte. Es wird empfohlen, das Gerät nach Verwendung dieser Option aus- und wieder einzuschalten.
Factory Reset
Nach Verwendung dieser Option werden alle Einstellungen auf die Werkseinstellungen zurückgesetzt. Alle übrigen Daten gehen verloren.Sie können diese Option in folgenden Fällen verwenden:
- Tauchgangsaufzeichnungen sind ungültig, unvollständig oder unauffindbar.
- Das Gerät funktioniert nicht korrekt, und Sie können keine funktionierenden Einstellungen finden.
Exit
Beendet den Einstellungsmodus. Das Gerät zeigt wieder den Navigations-Hauptbildschirm an.