Da der Kompass eine Grundfunktion der ENC3 ist, können Sie diesen sehr genau einstellen und kalibrieren.
Calibration (Kalibrierung)
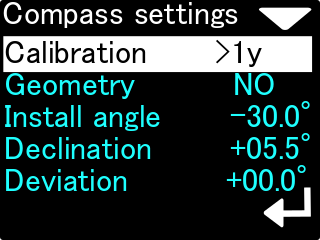
Auf der rechten Seite wird die Zeit seit der letzten Kalibrierung angezeigt (in Minuten, Stunden, Tagen oder als „> 1y“, wenn die letzte Kalibrierung länger als 1 Jahr her ist).
Diese Option dient der grundlegenden Magnetometer-Kalibrierung. Verwenden Sie diese Funktion, wenn die angezeigte Kompassrichtung ungenau ist. Dies ist in der Regel erforderlich, wenn sich die magnetischen Eigenschaften der Umgebung geändert haben.
An jedem Punkt der Erde variieren Magnetfeld, Deklination und andere Einflussfaktoren. Daher sollte der Kompass immer dann kalibriert werden, wenn der Standort verändert wurde.Dies gilt vor allem dann, wenn große Entfernungen zurückgelegt wurden (z. B. bei einer Reise auf einen anderen Kontinent oder in ein anderes Land).
Aktuelle Einstellungen
Durch Auswählen von MENU → SETUP → Compass → Calibration gelangen Sie zum nächsten Menü, das Informationen und Befehle zur Kompasskalibrierung enthält. Der Bildschirm wird nachfolgend dargestellt:
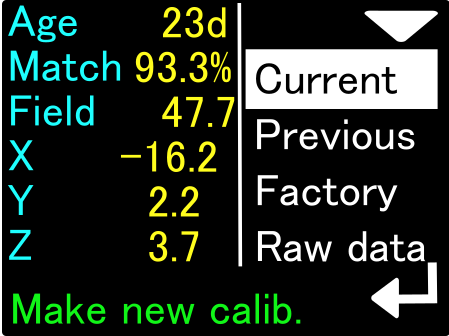
Kompasskalibrierung – aktuelle WerteEnthaltene Informationen:
Age (Alter)
Calibration age (time elapsed since the last calibration).
Match (Entsprechung)
Geschätzte Qualität der durchgeführten Kalibrierung. Ein Wert unter 80 % kann auf einen Gerätefehler oder auf externe Störungen während der Kalibrierung hinweisen. Die ideale Kalibrierung sollte 92-95 % dieses Parameters ergeben.
Field (Feld)
Die Länge des Magnetfeldvektors am Ort der Kalibrierung. Dieser Wert wird in Mikrotesla (uT) angegeben. Den korrekten Wert der Magnetfeldstärke können Sie z. B. mithilfe dieser Website ermitteln:
https://www.ngdc.noaa.gov/geomag/calculators/magcalc.shtml#igrfwmm
Sollte der von der ENC-Konsole in diesem Feld angegebene Wert um mehr als 10 % vom erwarteten Wert der Feldstärke (gemäß Online-Berechnung) abweichen, können Sie davon ausgehen, dass bei der Kalibrierung eine Störung aufgetreten ist, oder dass es am Ort der Kalibrierung lokale magnetische Anomalien gab.
X, Y, Z
Genaue Werteder Magnetometer-Kalibrierungskoeffizienten.Sie können diese Werte zu Vergleichszwecken (für nachfolgende Kalibrierungen) verwenden. Sie können diese Werte zu Vergleichszwecken (für nachfolgende Kalibrierungen) verwenden.
Die Werteim Bildschirm zur werkseitigen Kalibrierung haben die gleiche Bedeutung, beziehen sich jedoch auf die Einstellungen zum Herstellungszeitpunkt (sie können zu Vergleichszwecken verwendet werden).im Bildschirm zur werkseitigen Kalibrierung haben die gleiche Bedeutung, beziehen sich jedoch auf die Einstellungen zum Herstellungszeitpunkt (sie können zu Vergleichszwecken verwendet werden).
Ist Current hervorgehoben, kann die Kompasskalibrierung durch Drücken der Taste „New“ gestartet werden.
Vorherige Einstellungen
Ist das Feld Previous hervorgehoben, werden die vorherigen Kalibrierungseinstellungen angezeigt. Das Gerät speichert jeweils eine vorherige Kompasskalibrierung. Wenn Sie die untere Taste drücken, während das Feld „Previous“ hervorgehoben ist, werden die zuvor gespeicherten Werte (die z. B. einen Monat oder eine Woche alt sind) als aktuelle Kompasskalibrierung übernommen.
Werkseinstellungen
When the Factory field is highlighted, we see the factory calibration properties.
These are the parameters that the device had when the factory tests were carried out. Pressing the console’s lower button while Factory is highlighted will restore the compass to factory calibration.
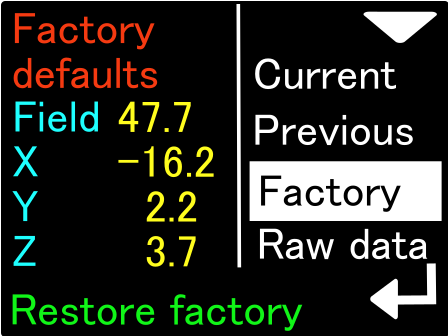
Bildschirm zur Wiederherstellung der werkseitigen Kalibrierung
Kalibrieren des Kompasses nach dem Zurücksetzen
Konnte das Problem durch die Wiederherstellung der werkseitigen Kalibrierung behoben werden, führen Sie eine normale Kalibrierung durch, um die Anzeigegenauigkeit zu optimieren:
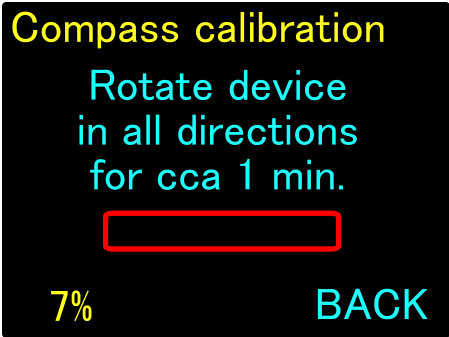
Während der Kompasskalibrierung sollten Sie das Gerät langsam und ruckfrei in alle Möglichen Richtungen drehen („eine sich neigende Acht, während Sie sich umdrehen“). Der hierbei angezeigte Bildschirm hat sich gegenüber der vorherigen Version nicht geändert. Es wurde lediglich die Anzeige des prozentualen Kalibrierungsfortschritts in der linken unteren Ecke des Bildschirms hinzugefügt.
Das interne Verfahren zur Ermittlung der Kompass-Kalibrierungsdaten hat sich jedoch grundlegend geändert.
Bisher wurde die .Kalibrierung nur nach ihrer Dauer ermittelt. Die Qualität der Kalibrierung hing vollständig von der Gründlichkeit des Benutzers ab.
In der aktuellen Softwareversion analysiert ein umfangreicher Algorithmus während der Kalibrierung die Bewegungen des Benutzers. Ein Statusbalken und eine digitale Anzeige auf dem Bildschirm geben den aktuellen Kalibrierungsfortschritt wieder.
Dreht der Benutzer das Gerät nicht wie erwartet oder jeweils nur um eine Achse, bleiben der Statusbalken und die Digitalanzeige unverändert und werden nach 5 Minuten Inaktivität zurückgesetzt.
Die Kalibrierung ist erfolgreich, wenn der Statusbalken in Grün angezeigt wird und die Digitalanzeige mindestens den Wert von 70 % erreicht. In diesem Moment wird in der rechten unteren Ecke des Bildschirms der Text APPLY (Anwenden) angezeigt, sodass der Benutzer die neue Kalibrierung durch Drücken der unteren Navigationstaste im Gerät speichern kann.im Gerät speichern kann.
Während der gesamten Kalibrierung kann der Vorgang durch Drücken der oberen Navigationstaste abgebrochen werden, ohne die Werte zu speichern.
Die Digitalanzeige kann maximal einen Wert von 120 % darstellen. In diesem Fall wurden 20 % mehr Daten als für die Kalibrierung erforderlich gesammelt.
Vorschau der aktuellen Sensorwerte
Die letzte Funktion im Menü zur Kompasskalibrierung ermöglicht das Anzeigen der aktuellen Werte, die von den Sensoren der ENC-Konsole ermittelt wurden. Diese Funktion wird durch Hervorheben der Option Raw data im Bildschirm zur Kompasskalibrierung aktiviert.
Wenn Sie die untere Taste der Konsole drücken, ändern Sie die Darstellung der Daten wie nachfolgend gezeigt:
Magnetometer-Rohdaten
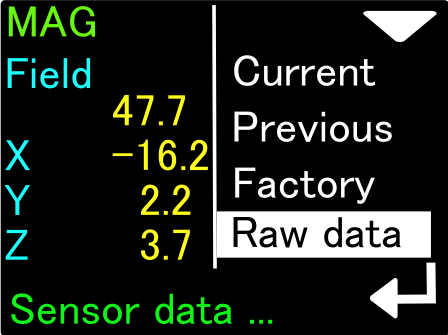
Die Daten des Magnetometers (Mag) sind z. BB. Dann hilfreich, wenn Sie einen guten Montageort für die ENC-Konsole suchen.Oszilliert der Gesamtwert für das Magnetfeld (Field) z. B. rund um den Wert 47,7 uT (wie in der Abbildung oben), können Sie eine Veränderung dieses Werts beobachten, wenn Sie die ENC-Konsole näher an den Scooter heranbewegen.Zeigt sich eine große Veränderung (mehr als 10 %), ist dieser Ort nicht zur Montage geeignet, da die ENC-Konsole einem störenden magnetischen Einfluss ausgesetzt wäre.
Auf gleiche Weise können Sie den Einfluss von Komponenten ermitteln, indem Sie diese näher an die ENC-Konsole heranbewegen. Durch die Veränderung des Feldwerts zeigt sich, welche Objekte ein Magnetfeld erzeugen oder das vorhandene Magnetfeld verändern, sodass Sie nicht in der Nähe der ENC-Konsole verbleiben sollten.
Beschleunigungsmesser-Rohdaten
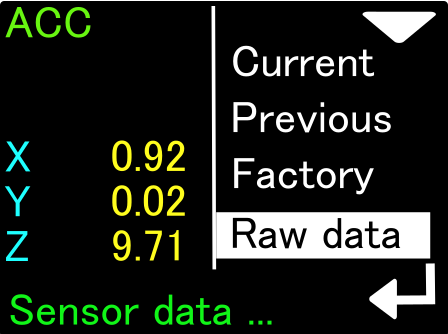
Accelerometer (ACC) data is needed to determine console tilt. The values on this screen are accelerations expressed in m / s2. If we place the console perfectly vertical, the value on one of the axes (X, Y or Z) should be close to 9.81 (this is the average acceleration due to gravity), and the other values should be close to 0. If the acceleration due to gravity cannot be observed, or when the vertically positioned device does not show zero on at least 2 axes, it may indicate its damage (e.g. due to a very strong impact).
The compass may not be correct in this case.
Gyroskop-Rohdaten
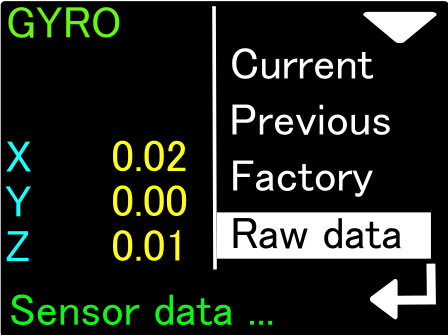
Die Gyroskopdaten (GYRO) werden zur Ermittlung der Kompassrichtung verwendet, wenn sich die Bewegungsgeschwindigkeit oder die Richtung abrupt ändert. In Ruhe sollten die Werte dieses Sensors nahezu 0 betragen (akzeptable Werte liegen dann im Bereich von0 bis 0,02). Andernfalls kann das Gyroskop beschädigt sein, was sich nachteilig auf die Kompassberechnungen auswirken kann. Andernfalls kann das Gyroskop beschädigt sein, was sich nachteilig auf die Kompassberechnungen auswirken kann.
Euler-Winkel
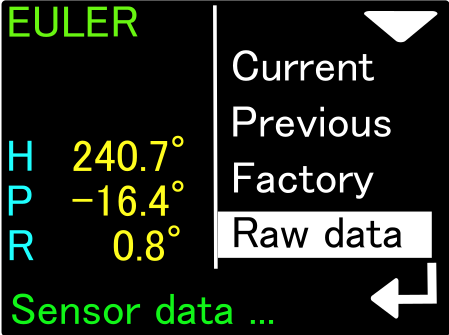
Der letzte Bildschirm (EULER) zeigt das Ergebnis eines direkten Aufrufs der ENC-Berechnungsalgorithmen. Folgende Winkel sind vorgegeben: H – Heading = Kompassrichtung ohne Korrekturen für Deklination und Abweichung), P – Pitch = Auf- oder Abstiegswinkel.Beim Aufstieg sind die Werte positiv, beim Abstieg negativ.R – Roll = Rollwinkel.Ein positiver Wert steht für die Neigung nach rechts, ein negativer für die Neigung nach links.
Funktioniert die Darstellung der Euler-Winkel nicht wie beschrieben, muss das Gerät auf die Werkseinstellungen zurückgesetzt und neu kalibriert werden. Lässt sich das Problem damit nicht beheben, muss die ENC-Konsole zur Wartung eingesendet werden.
Geometry (Geometrie)
Diese Option ermöglicht eine Präzisionskalibrierung. Wird diese Option aktiviert, werden 8 Koeffizienten angezeigt. Im Idealfall (ohne Störungen) lauten diese Koeffizienten wie folgt: 0, 45, 90, 135, 180, 225, 270 und 315. Mit dieser Option können Sie die höchste Kompassgenauigkeit (~1°) erzielen. Ohne Verwendung dieser Option kann die Kompassgenauigkeit je nach Kalibrierungsqualität (siehe oben) 3-5° betragen.
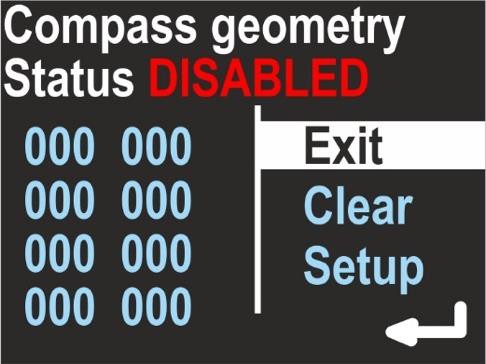
Drücken Sie die obere Taste, um die Option zu ändern:
Exit (Beenden)
Verlassen des Menüs ohne Änderungen
Clear (Löschen)
Switches off the precision calibration and clears all its coefficients.
Setup (Einrichtung)
Make a new precision calibration.
To make a new precision calibration, you should use the SET option. You will be asked to set the device in true geographical direction of 0, 45, 90, 135, 180, 225, 270 and 315 degrees. The device should be positioned vertically, like being attached to the DPV.
The Display shows:
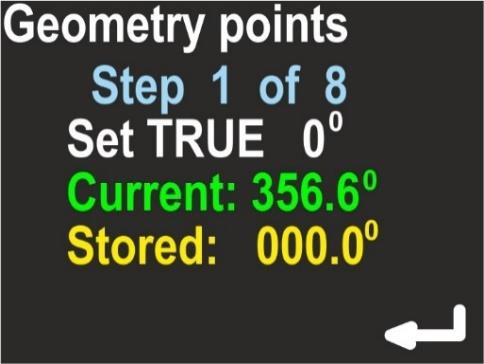
Current (Aktuell)
Grobe Richtungsangabe vom Magnetometer, jedoch ohne Korrektur.
Stored (Gespeichert)
Gespeicherter Wert für diesen Schritt.
Durch Drücken der unteren Taste wird der Wert von Current als Stored übernommen.
Durch Drücken der oberen Taste gelangen Sie zum nächsten Schritt.
Im letzten Schritt können Sie überprüfen, ob diese Kalibrierung die Richtungsanzeige verbessert hat.
Dieser Bildschirm trägt die Bezeichnung ‘Accuracy test’ (Genauigkeitsprüfung) und enthält:
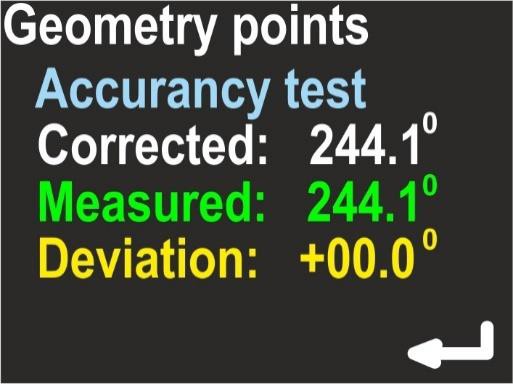
Corrected (Korrigiert)
Richtungswert mit Korrektur
Measured (Gemessen)
Grobe Richtungsangabe vom Magnetometer
Deviation (Abweichung)
Ermittelte Korrektur.Korrigiert = (Gemessen + Abweichung) geteilt durch 360.
Sind die korrigierten Werte besser als die gemessenen, drücken Sie die untere Taste (ENTER), um die Ergebnisse zu speichern. Wenn Sie die obere Taste drücken, werden keine Änderungen gespeichert.
Install angle (Installationswinkel)
Die letzte neue Funktion im Menü zur Kompasskalibrierung ist die Option Install angle. Mit dieser Option lässt sich die Genauigkeit und Wiederholbarkeit der Kompassanzeige erheblich steigern.
Der elektronische Kompass der ENC-Konsole funktioniert nur dann korrekt, wenn die Konsole dauerhaft mechanisch mit dem Korpus des Scooters verbunden ist, sodass sich diese Position während des gesamten Tauchgangs nicht verändert. Außerdem muss der Winkel zwischen dem Gerätebildschirm und der Scooter-Achse bekannt und unveränderlich sein.
In der vorherigen Version der ENC-Software sind wir davon ausgegangen, dass der Benutzer die ENC-Konsole auf eine bestimmte Weise anbringen kann (siehe Abb. unten), wobei der Installationswinkel in einem bestimmten Bereich (0 – 35 Grad) bleibt:
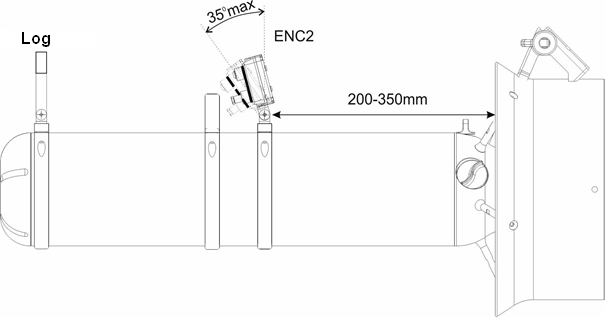
Durch die Analyse einiger eher untypischer Anwendungsszenarien haben wir erkannt, dass diese vereinfachte Montage für einige Taucher aufgrund ihrer gewohnten Verhaltensweise oder der spezifischen Tauchgangsbedingungen unzureichend ist. Es kann in diesen Fällen zu Fehlern bei der Ermittlung der Strömungsrate kommen, die dazu tendieren, sich aufzuaddieren.
Aus diesem Grund wurde dem Installationswinkel in dieser Version ein eigener Konfigurationsbereich gewidmet.Es ist unbedingt erforderlich, dass der Benutzer diesen Parameter korrekt konfiguriert.
Wofür steht der Installationswinkel, und welche Bedeutung hat er?
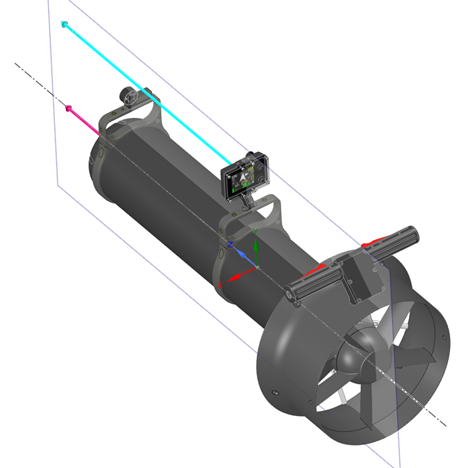
Die ENC-Konsole würde idealerweise genau senkrecht zur Scooter-Hülle angebracht. In diesem Fall wäre der Installationswinkel = 0 (siehe Abb. unten).
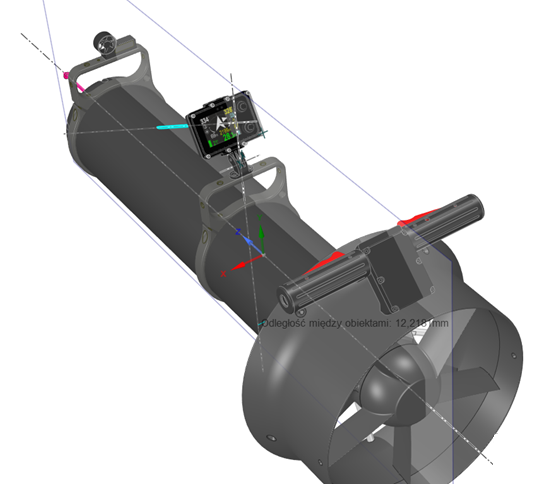
Diese Positionierung ist jedoch in der Regel praktisch nicht umsetzbar. So lässt sich z. B. die Konsole bei „leicht nach vorn geneigter“ Montage deutlich besser ablesen. In diesem Fall wäre der Installationswinkel negativ. Der Wert dieses Winkels kann je nach den Anforderungen des Benutzers variieren. Wird die Konsole leicht geneigt und der Scooter nicht gerade und aufrecht ausgerichtet, entspricht die von der ENC-Konsole ermittelte Kompassrichtung nicht der Bewegungsrichtung des Scooters.
Scooter wird nicht geneigt – korrekte Werte
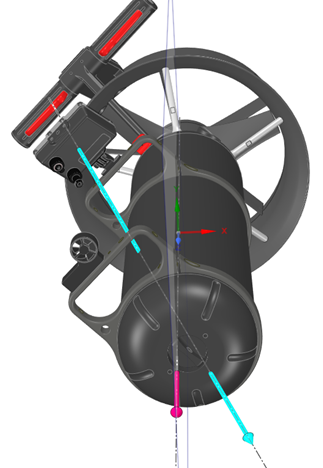
Scooter wird geneigt – geänderte Werte
Dieser Fehler tritt auf, wenn die ENC-Konsole keine Kompensation vornimmt.
In der vorherigen Version der Konsolensoftware war diese Kompensation nur in einem kleinen Bereich des Installations- und Neigungswinkels möglich. Die ENC-Konsole wählte die korrekten Werte automatisch aus, ohne dass der Benutzer diese beeinflussen konnte.
Einstellen des Installationswinkels
Mit der neuen Softwareversion erhält der Benutzer die volle Kontrolle über alle erforderlichen Parameter.
Die Einstellung erfolgt unter MENU → SETUP → Compass → Install angle.
Der Bildschirm der ENC3 sieht wie folgt aus:
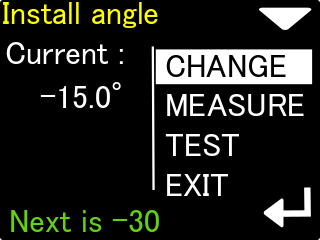
Der aktuelle Wert des Installationswinkels wird angezeigt.
Durch Drücken der unteren Taste können Sie den Installationswinkel ändern:
0 …- 15 …- 30 …- 45 …- 60 … 0 … -15 …
Der nächste mögliche Wert wird am unteren Bildschirmrand in Grün angezeigt.
Durch Drücken der oberen Taste können Sie zur nächsten Option wechseln:Winkelmessung (MEASURE).
Messen des Installationswinkels
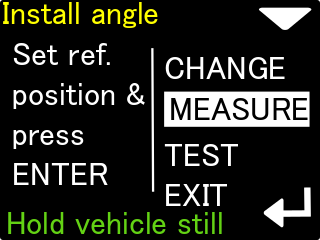
Schritt 1
Bringen Sie die ENC-Konsole genau senkrecht zur Scooter-Hülle an, und drücken Sie einmal die untere Taste. Auf diese Weise wird die Referenzposition (Winkel = 0 Grad) ermittelt.
Bewegen Sie den Scooter während der gesamten Messung nicht.
Der Scooter muss allerdings nicht auf eine bestimmte Art ausgerichtet werden.
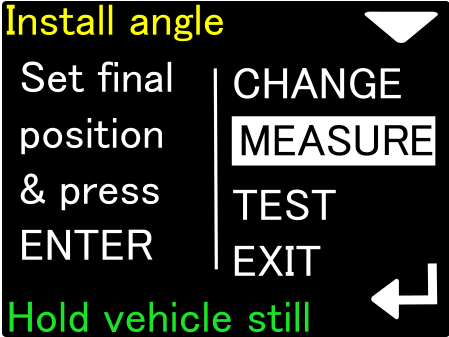
Schritt 2
Neigen Sie die ENC-Konsole in die vom Benutzer gewünschte Position.
Drücken Sie erneut die untere Taste.
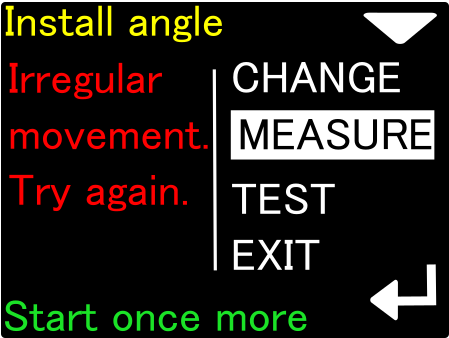
Sollte sich der Scooter während der Messung des nstallationswinkels bewegen, wird die Messung nicht akzeptiert. Sie können die Messung in diesem Fall durch Drücken der unteren Taste erneut starten.
Durch die Ermittlung des Installationswinkels können Sie die ENC-Konsole benutzerfreundlich positionieren.
Bestätigen des Installationswinkels
Aktivieren Sie die Option „TEST“ und prüfen Sie, ob sich der weiße Punkt innerhalb des grünen Kreises befindet:
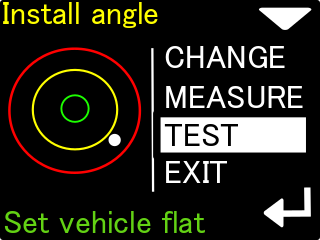
Ist dies das Fall, haben Sie den Installationswinkel korrekt eingestellt.
Wenn Sie den Scooter nach rechts oder links neigen, sehen Sie, dass sich der weiße Punkt in die entgegengesetzte Richtung bewegt.
If the white dot is below the center, the Install angle selected by us is too small
(e.g. we set -15 and it should be -30 degrees).
Das Gegenteil ist der Fall, wenn sich der weiße Punkt oberhalb der Mitte befindet.
Declination (Deklination)
Einstellen der magnetischen Deklination. Dies ist ein konstanter Wert, der zur im Display angezeigten Richtung (und zu allen Positionsberechnungen) addiert wird. Ist der Wert als E (East/Osten) gekennzeichnet, ist die Korrektur positiv. Ist der Wert als W (Westen) gekennzeichnet, ist die Korrektur negativ. Die magnetische Deklination ist ein konstanter Wert, der von der geografischen Region abhängt.Den entsprechenden Wert für Ihren Standort können Sie aus verschiedenen Quellen beziehen.
Deviation (Abweichung)
Einstellen der magnetischen Abweichung. Dies ist ein konstanter Wert, der zu der im Display angezeigten Richtung (und zu allen Positionsberechnungen) addiert wird. Die Abweichung ist ein konstanter Wert, der von magnetischen, nicht entfernbaren Elementen in der Nähe des Navigationsgeräts verursacht wird. In den meisten Fällen wird dieser Wert auf 0 gesetzt.