Einleitung
Der Surveyor ist eine Zubehörkomponente für die Navigationskonsole ENC3. Sie ermöglicht das Vermessen mithilfe gespannter Leinen, die häufig als Referenz verwendet werden, beispielsweise beim Höhlentauchen oder in der Archäologie.
Mit der auf dem Scooter montierten ENC3 wird das Vermessen zu einer schnellen und präzisen Angelegenheit. Diese Lösung wurde für beengte Umgebungen (z. B. Höhlen), bzw. für Orte mit starken Strömungen konzipiert. Für höchste Genauigkeit wird das Anlegen eines dauerhaften Referenzrasters empfohlen.

Mechanischer Aufbau

- ENC-Konsole, kompatibel mit dem Standardanschluss des Surveyor (ENC3-Stecker)
- Oberer Verbinder. Hierbei handelt es sich um eine Schraube mit zwei Knebeln (diese setzt voraus, dass die ENC3 mit einem gewindelosen, dreiteiligen Verbindungsstück ausgestattet ist).
- Unterer Verbinder. Zwischen 2 und 3 befindet sich eine Verlängerung, die für einen ausreichenden Abstand zwischen dem Magnetometer der Navigationskonsole und dem Messrad des Unterteils sorgt, das Magnete enthält.
- Führungsräder. Diese Räder dienen lediglich der Positionierung des Surveyor auf der Leine.
- Führungsleine/gespannte Leine. Diese Leine wird mit dem Surveyor vermessen.
- Messrad. Dieses Rad enthält Magnete, mit deren Hilfe die Umdrehungszahl des Rads ermittelt werden kann.
- Schraube des Messrads. Sollte das Messrad durch feines Sediment blockiert werden, kann mit diese Schraube der Spalt zwischen dem Rad und der Vorrichtung gereinigt werden.
- Die Räder 4 und 7 sind am Surveyor-Korpus angebracht, der Leitungen für die Messsignale und einen Kabelanschluss umfasst.
Vorbereitung für die Verwendung
Montieren des Surveyor
Stellen Sie sicher, dass die ENC-Konsole vollständig aufgeladen ist. Verbinden Sie die Konsole mit dem Surveyor-Arm, und schließen Sie das Kabel an. Stellen Sie sicher, dass die O-Ringe geschmiert und frei von Kontamination sind.
Sie können den Surveyor für den Transport zum Einsatzort einklappen und so z. B. in einer Tasche verstauen, oder in den Transport-D-Ring einhängen.
Achten Sie darauf, das Verbindungskabel nicht zu knicken und halten Sie das Verbindungskabel während des Tauchgangs von scharfkantigen Objekten fern.
Es wird empfohlen, aus einem Stück Cave-Line eine Schlaufe zu erstellen, um einen Einhängepunkt für einen Doppelender zu schaffen. Sie können auch eine andere Befestigungsmethode verwenden, um das Gerät je nach Einsatzort mit dem Taucher zu verwenden.
Konfigurieren der ENC
Passen Sie im ENC-Einrichtungsmenü verschiedene Einstellungen an, um das Gerät produktiv zu nutzen.
Aufgrund der Besonderheiten bei Vermessungsarbeiten empfehlen wir die nachfolgend beschriebenen Einstellungen. Es gibt jedoch auch weitere Konfigurationsmöglichkeiten, die für eine spezielle Aufgabe besser geeignet sind. Wenn Sie über ein entsprechendes Verständnis der ENC-Funktionsweise verfügen, können Sie diese Einstellungen nach Belieben ändern.
Des ist die Liste der empfohlenen Einstellungen. Wird ein Parameter hier nicht aufgeführt, bedeutet dies, dass er keine größere Bedeutung für den korrekten Betrieb hat.
- Record every – 5 s. Eine Vermessung von Hand erfolgt langsamer, als beim Einsatz eines Scooters. Aus diesem Grund wird in der Regel kein Datenerfassungsintervall von 2 Sekunden benötigt. Je häufiger Daten gespeichert werden, desto größer ist die Wahrscheinlichkeit, dass ‚unnötige‘ Punkte erfasst werden.
- Depth threshold – 0,5 m. Da viele Vermessungen an der Wasseroberfläche beginnen/enden oder einen sehr flachen Verlauf aufweisen, verhindert diese Einstellung unerwünschte Reaktionen.
- Auto-ON – Nein. Da es häufig eine gewisse Zeit dauert, bis der Startpunkt der Vermessung erreicht ist, gibt es keinen Grund, den Akku der ENC vorzeitig zu belasten.
- Auto-OFF – Ja. Sollten Sie vergessen, die ENC auszuschalten, oder kommt es beim Transport zu einem versehentlichen Einschalten, kann das Gerät im entscheidenden Moment ausfallen, weil es entladen ist.
- Auto-REC – Nein. Die Feinjustierung des Surveyor macht es ggf. erforderlich, das Gerät vor dem Beginn der Aufzeichnung auf der Leine zu verschieben.
- Auto-HOLD – Nein
- Die ENC sollte zur Vermessung ohne ein programmiertes Ziel eingesetzt werden. Zukünftig wird möglicherweise ein dedizierter Vermessungsmodus implementiert.
Kalibrieren der Geschwindigkeitseinstellung
Die ENC zeichnet die Vorwärtsbewegung des Geräts auf Basis der aktuellen Impulsanzahl auf. Im Falle eines Tauchers mit Scooter ist dieser Wert leicht variabel. Dies wird im Kapitel zur Kalibrierung des ENC-Geschwindigkeitssensors beschrieben.
Da der Surveyor eine andere Messschaltung verwendet, muss der Kalibrierungsfaktor beim Wechsel zwischen der Vermessung mit Scooter bzw. Surveyor angepasst werden.
Wählen Sie für den Geschwindigkeitssensor die Einstellung „External log“k und setzen Sie den Kalibrierungsfaktor auf 2762.
Dieser Wert bedeutet, dass bei einer Entfernung von 100 m 2762 Impulse erzeugt werden – einer alle 3,62 cm. Somit beträgt die Mindestauflösung des Surveyor 3,62 cm (nach dem Zurücklegen dieser Entfernung wird ein neuer Impuls erzeugt).
Dieser Kalibrierungsfaktor hängt nicht von der Leinendicke ab. Der Surveyor kann generell mit einer Leinendicke von 1-3 mm verwendet werden, wobei auch Knoten möglich sind. Auch dickere Leinen können vermessen werden, allerdings können Knoten hierbei zu Problemen führen.
Kalibrieren des Kompass
Für den korrekten Betrieb muss der ENC-Kompass mit höchstmöglicher Präzision arbeiten. Lesen Sie den Abschnitt zur Kompasskalibrierung im ENC-Handbuch.
Es wird empfohlen, die Einstellung „Install angle“ auf 0* zu setzen. Halten Sie das Gerät während der Vermessung möglichst vertikal (die Erklärung erfolgt später).
Kalibrieren Sie den ENC-Kompass, während die Navigationskonsole am Surveyor in Vermessungsposition montiert ist. Dies kann vor dem Tauchen oder unter Wasser erfolgen.
Kalibrieren Sie das Gerät in einer Umgebung ohne magnetische Störungen, d. h. ohne Armbanduhr, ohne Telefon in der Tasche und ohne andere elektrische Geräte in der Nähe.
Der Übereinstimmungsfaktor (der die Kalibrierungsqualität angibt) sollte um die 90 % betragen, optimalerweise über 90 %. Ein Wert unter 80 % zeigt an, dass die Kalibrierung für eine präzise Vermessung nicht ausreicht.
Einstellen der richtigen Deklination und der Salinität
Denken Sie daran, für den Bereich der Vermessung die richtige Deklination einzustellen.
Prüfen Sie, ob die Salinität für den Tauchplatz korrekt eingestellt ist.
Messungen unter Wasser
Die Grundidee
Der Surveyor misst und speichert das Linienpolygon zwischen den Leinen-Befestigungspunkten. Die Entfernungsmessung basiert auf dem direkten Kontakt des Messrads mit der Leine, sodass sich das Messrad dreht und Bewegungsinformationen an die ENC sendet.
Die ENC misst außerdem die Tauchtiefe und die Kompassrichtung. Alle ermittelten Werte werden zusammen in der Vermessungsdatei gespeichert.
Aufgrund der konstanten Messung ist die Platzierung oder Ablenkung der Leine kein Problem. Da jedoch jede Leine einige Stabilisierungspunkte (Tie-Offs) und ggf. auch Line-Marker oder Cookies aufweist, können Situationen eintreten, die eine besondere Vorgehensweise erfordern.
Leinenspannung
Der Surveyor unterstützt 2 Modi für die Leinenführung:


Ist die Leine gut gespannt, verwenden Sie Position A.
Verwenden Sie für lockere Leinen Position B.
Bei komplett durchhängenden Leinen können Sie diese auch um eine der Rollen wickeln.
Folgendes ist wichtig:
- Erzeugen Sie keine zu große Leinenspannung, da dies die Bewegung des Surveyor beeinträchtigt.
- Stellen Sie sicher, dass die Leine so fest um das Messrad gelegt ist, dass sich dieses zuverlässig dreht.
Durchführen einer Messung
Einfache Entfernung
Nach dem Abschluss der Vorbereitungen können Sie mit der Messung unter Wasser beginnen.
Starten Sie beim ersten Tie-Off. es wird empfohlen, bei einer gut definierten Position zu beginnen, die später in die andere Vermessung integriert werden kann (markierter Vermessungspunkt), oder die sich per Georeferencing eingeordnet werden kann.
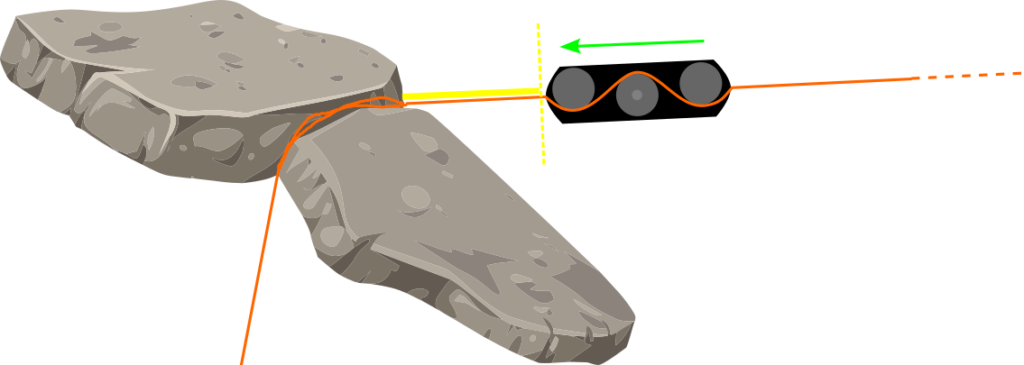
Die Surveyor-Position wird als einfaches Symbol mit 3 Rädern dargestellt. Die Symbole haben keinen Maßstab – das Gerät ist tatsächlich viel kleiner.
Platzieren Sie den Surveyor möglichst nahe am Tie-Off. Richten Sie ihn so aus, dass das ENC-Display zum Taucher weist, der sich in Messrichtung bewegt (auch dann, wenn sich dieser rückwärts durch eine Engstelle hindurchschiebt).

Drücken Sie die Taste REC, und stellen Sie sicher, dass das rote Symbol „REC“ blinkt.
Schieben Sie nun den Surveyor mit leichtem Druck voran, und halten Sie die ENC dabei möglichst vertikal. Die Konsole muss dabei einen Winkel von 0* in Bezug zum Erdboden beibehalten (sofern ein solcher Installationswinkel definiert wurde). Dies bedeutet, dass die Konsole bei einer parallel zum Boden verlaufenden Führungsleine vertikal gehalten werden muss (wie in der Abbildung oben).
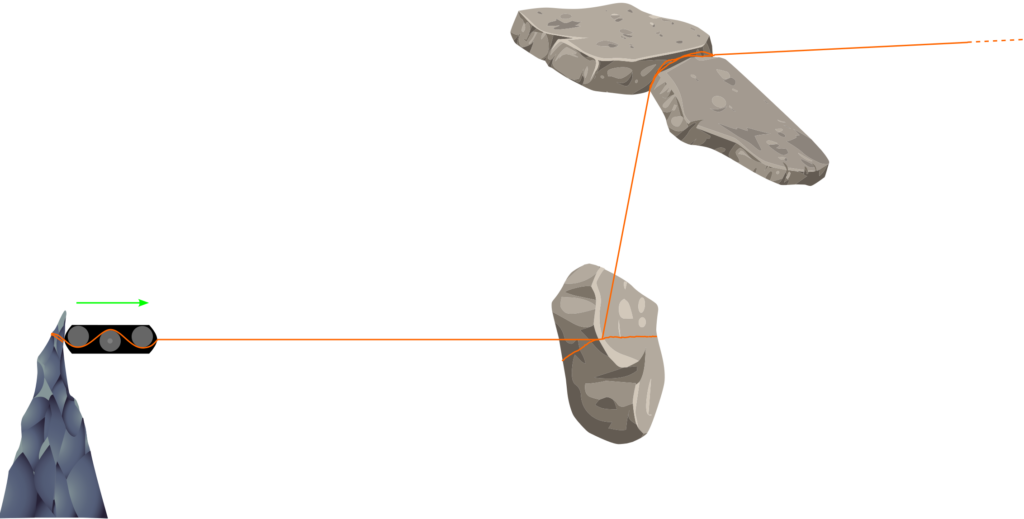
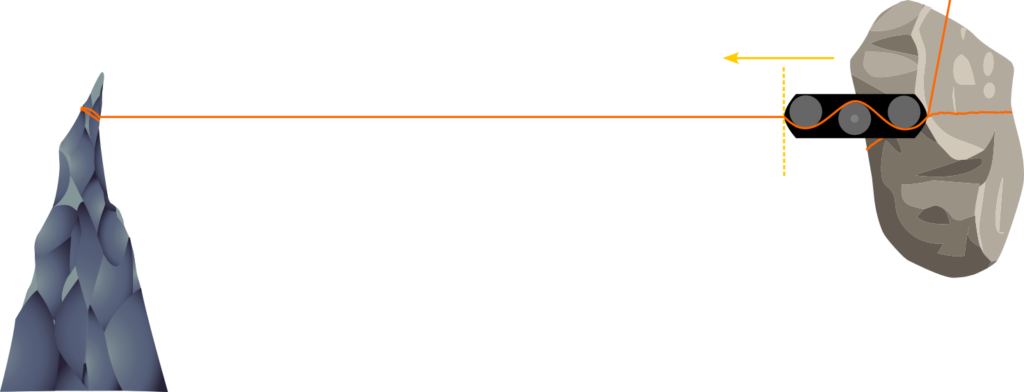
Irgendwann erreichen Sie dann den nächsten Tie-Off (wie unten angegeben).
Einem sorgfältigen Beobachter wird auffallen, dass die vom Messrad zurückgelegte Strecke nicht der Leinenlänge zwischen den Tie-Offs entspricht. Der Grund hierfür ist die Länge des Surveyor.
Bei Start und Ende der Vermessung ist das Messrad eine halbe Surveyor-Länge vom absoluten Leinenende entfernt.
Zum Messen der tatsächlichen Leinenlänge können Sie einen einfachen Trick anwenden, um die Genauigkeit zu erhöhen: Das Messrad erkennt die Bewegungsrichtung nicht, sondern geht davon aus, dass eine stetige Vorwärtsbewegung ausgeführt wird.
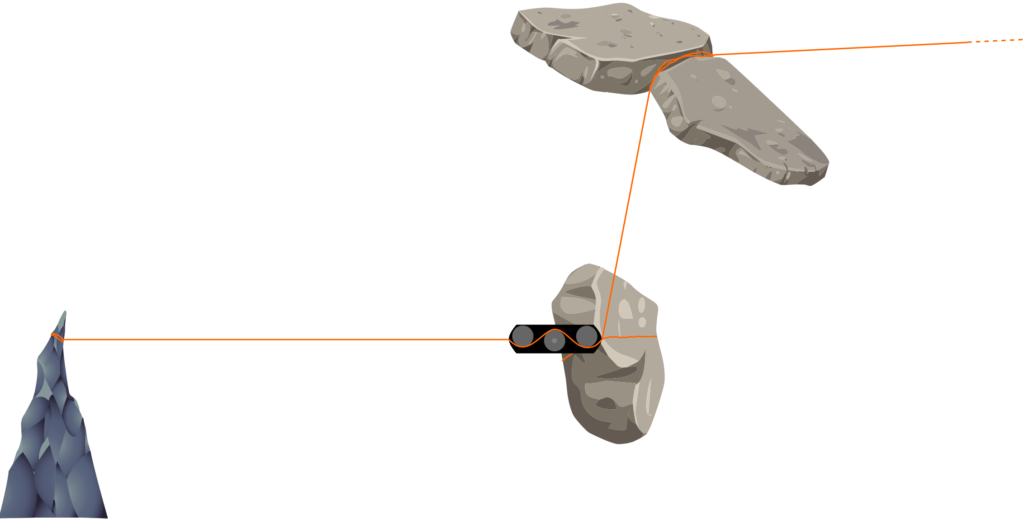
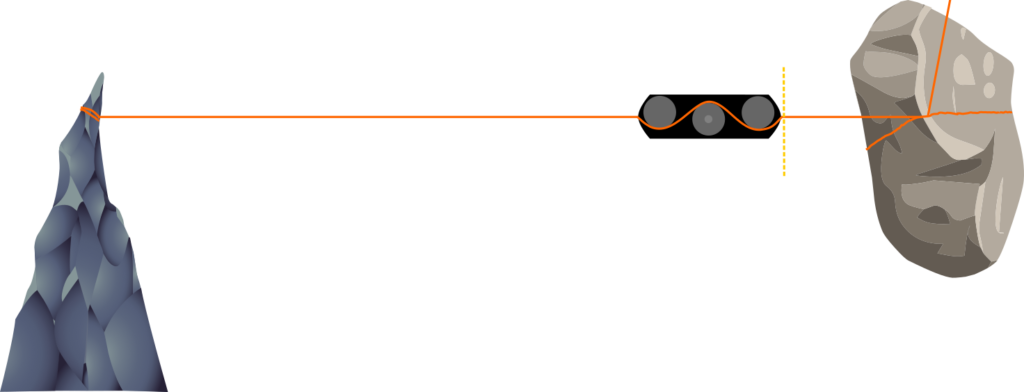
Bewegen Sie das Gerät eine ganze Gerätelänge rückwärts:
Nun können Sie die Erfassung stoppen (ändern Sie REC in HOLD) und von der Leine nehmen.
Noch etwas spricht für diesen Ansatz:
Wird der Status REC in HOLD geändert, wird ein Wegpunkt (WOT) gespeichert.
Auf diese Weise wird bei jedem Wechsel von REC zu HOLD ein neuer Wegpunkt gespeichert,l und dessen Nummer wird auf dem ENC-Display angezeigt. Diesen Nummern kann eine Beschreibung zugeordnet werden, z. B. „Mögliche Abzweigung“, „T-Kreuzung“, oder „Fundort“ – je nach Aufgabe.
Überwinden eines Hindernisses
Es besteht die Möglichkeit, dass Sie während der Vermessung auf ein Hindernis stoßen, sodass Sie den Surveyor von der Leine nehmen müssen. Wenn es sich um ein kleines Objekt handelt (ein großer Knoten, eine Markierung oder eine verbundene Leine), gehen Sie genau so vor, wie bei einem Tie-Off.
Beginnen Sie nun mit dem Vermessen des nächsten Schlags: Platzieren Sie den Surveyor am Tie-Off, aktivieren Sie den Modus REC, und schieben Sie den Surveyor zum nächsten Tie-Off.
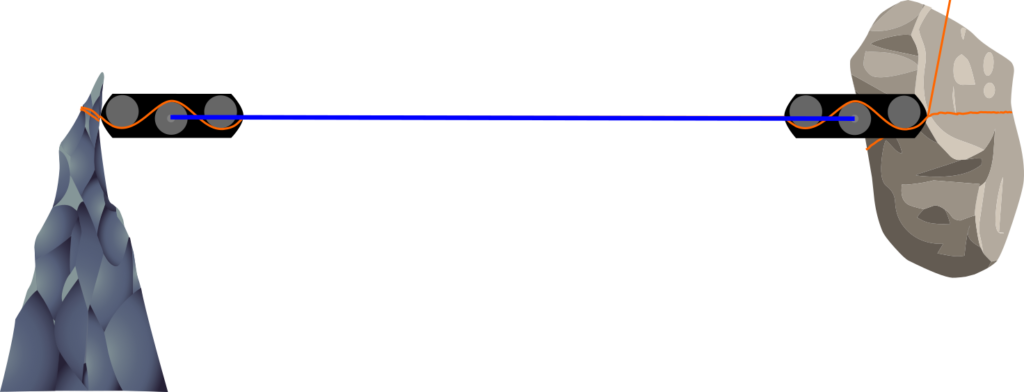
Leider wurde die Stabilisierungsleine in diesem Fall nicht sehr gut angebracht. Das Gerät kann nicht bis zum Leinenende bewegt werden, da die Leine lediglich um den großen Fels gewickelt wurde. Setzen Sie die Vermessung bis zum Leinenende fort, bewegen Sie das Gerät eine Surveyor-Länge zurück, wechseln Sie von REC zu HOLD, und ziehen Sie in Betracht, diese Situation zu kompensieren.
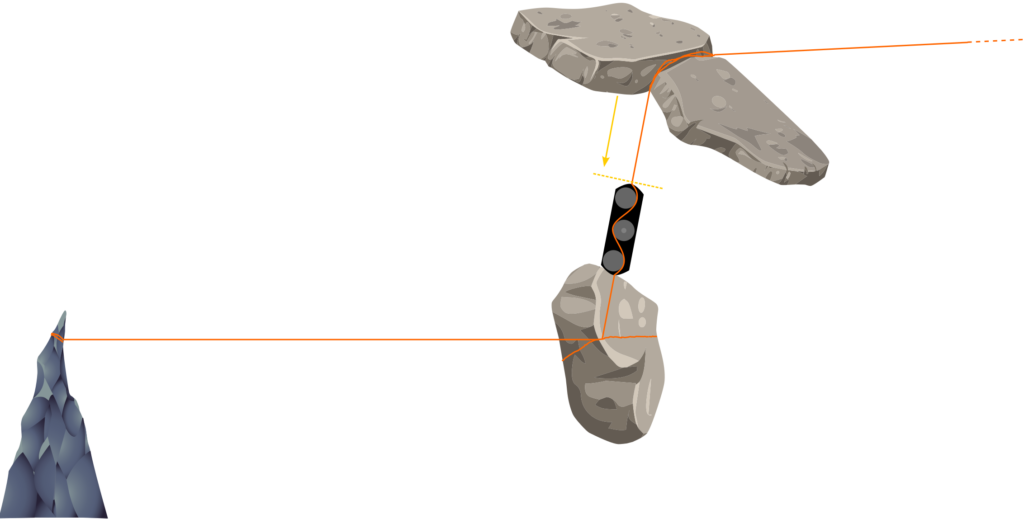
Eine bestimmte Strecke kann nicht vermessen werden (gelbe Linie).
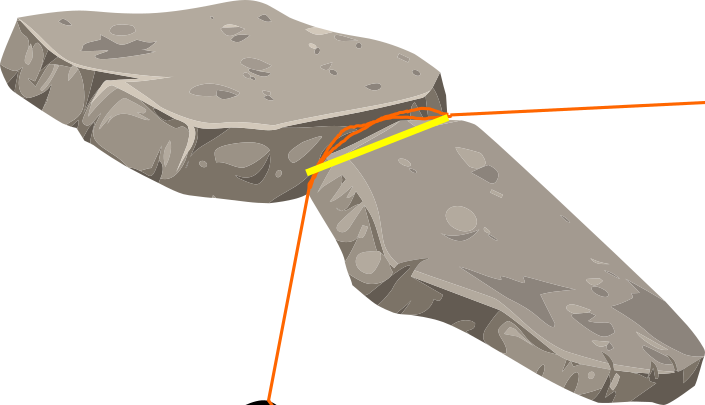
Um dieses Problem zu bewältigen, müssen Sie entscheiden, ob Sie am Ende der aktuellen Teilstrecke „Länge hinzufügen“, oder ob Sie dies am Tie-Off tun wollen. Sie können das Addieren der Länge natürlich auch aufteilen, aber in der Praxis hat sich gezeigt, dass das Auswählen einer Seite vorzuziehen ist.
In diesem Fall ist der Winkel nach dem Tie-Off ganz ähnlich, weshalb Sie die Länge dort hinzuaddieren werden.
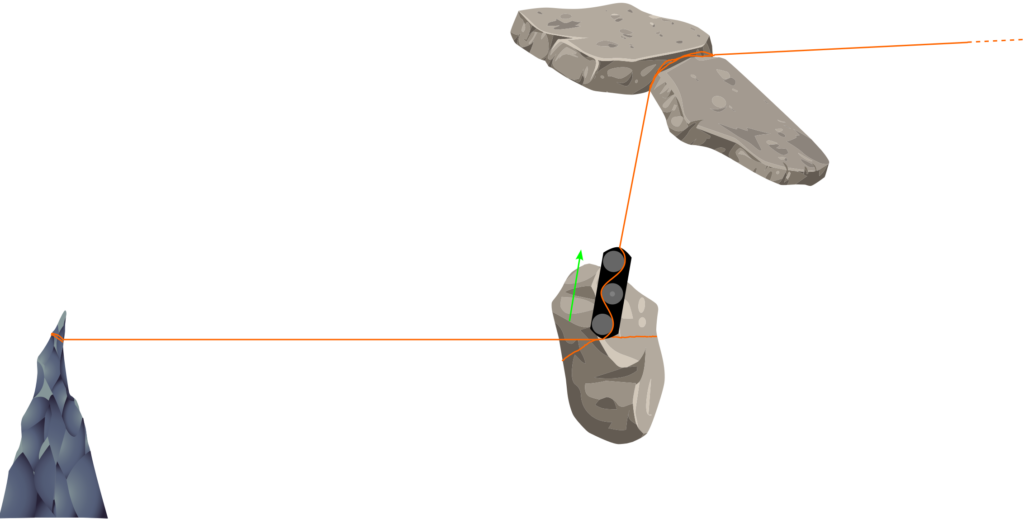
Platzieren Sie den Surveyor in einer Entfernung entsprechend der gelben Linie vor dem Tie-Off, und aktivieren Sie den Modus REC.
Bewegen Sie nun den Surveyor zum Tie-Off/Hindernis und danach in die nächste Richtung (ohne das Gerät von der Leine zu nehmen).
Vergessen Sie nicht, am Ende der Messung eine Gerätelänge hinzuzufügen.
Diese Methode bietet keine 100 %ige Genauigkeit, ermöglicht jedoch bei relativ kurzen Distanzen (20 – 40 cm) die deutliche Verringerung von Fehlern aufgrund von Hindernissen im Leinenverlauf.
Gehen Sie auf diese Weise vor, bis die gesamte Vermessung abgeschlossen ist.
Vermessen geneigter Leinen und Schächte
Bei einer vertikalen oder stark geneigten Leine verwenden Sie den Surveyor wie zuvor beschrieben.

Beginnen mit einer neuen Route unter Wasser
Wenn Sie unter Wasser mit einer neuen Route beginnen müssen, beachten Sie, dass gemessene Routen mit einer Gesamtlänge von weniger als 10 m nicht gespeichert werden.
Aktivieren Sie das Menü, und schalten Sie das Gerät durch Auswählen von TURN OFF aus. Nach dem erneuten Einschalten (ON) wird eine neue Route gestartet, der eine höhere Nummer zugewiesen wird.
Sie können die Route unter Wasser durch Auswählen von GRAPH anzeigen (Plan und Profil).
Datenverarbeitung
Vorgehensweise bei registrierter Route
Wenn Sie die Daten aus der ENC auslesen möchten, lesen Sie die ergänzenden Softwareinformationen im ENC-Handbuch.
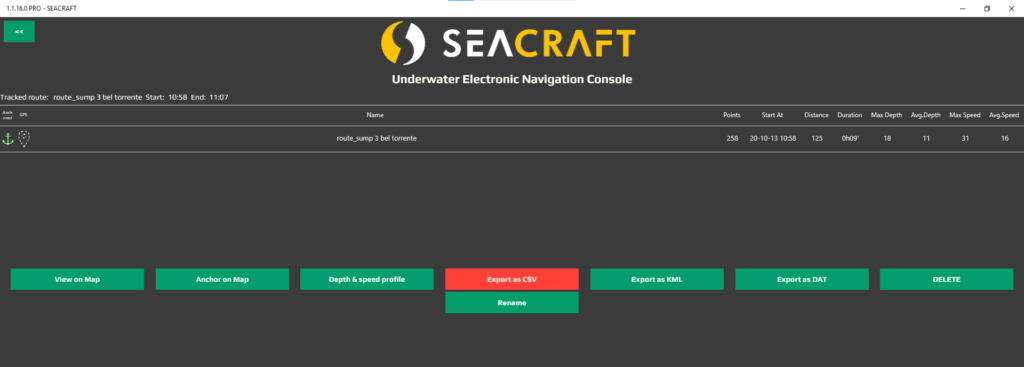
Nach dem Herunterladen der Route in die Seacraft-Software für Windows 10, muss die Route verankert werden. Dies ist erforderlich, um die nächsten Schritte ausführen zu können. Da der genaue Ausgangspunkt häufig nicht bekannt ist, lässt sich eine Route beliebig verankern z. B. in der Mitte der Ostsee.
Sollten Sie zuvor einen Fehler gemacht haben (z. B. könnten Sie vergessen haben, die Deklination hinzuzufügen oder den Kalibrierungsfaktir falsch eingegeben haben), lässt sich dies beim Verankern der Route korrigieren (wobei die CSV-Datei verändert wird).

In diesem Beispiel handelt es sich um die Vermessung eines kurzen Sumpfs (107 m). Die Tie-Offs sind klar als Wegpunkte zu sehen.
Nun soll die CSV-Datei exportiert werden.
CSV steht für „Comma-Separated Values“ (durch Komma getrennte Werte). Dies ist ein offenes und einfaches Format, dass problemlos von Geräten und Computern eingelesen werden kann.
Für dieses Beispiel wird eine Excel-Tabelle verwendet, um auf die Daten zuzugreifen und diese zu organisieren.
Öffnen Sie eine neue Datei, und klicken Sie auf DATEN –> Aus Textdatei importieren
Verwenden Sie die Option „Komma“ als Trennzeichen, und formatieren Sie alle Spalten als „Text“.
Somit sollten Sie eine Tabelle ähnlich der folgenden erhalten, die die von der ENC aufgezeichneten Routendaten enthält.
ENC-Datenformat
Die ENC speichert eine Route in einem eigenen Datenformat.
Für den effizienten Einsatz der ENC für die Vermessung müssen Sie die Struktur dieser Daten verstehen.
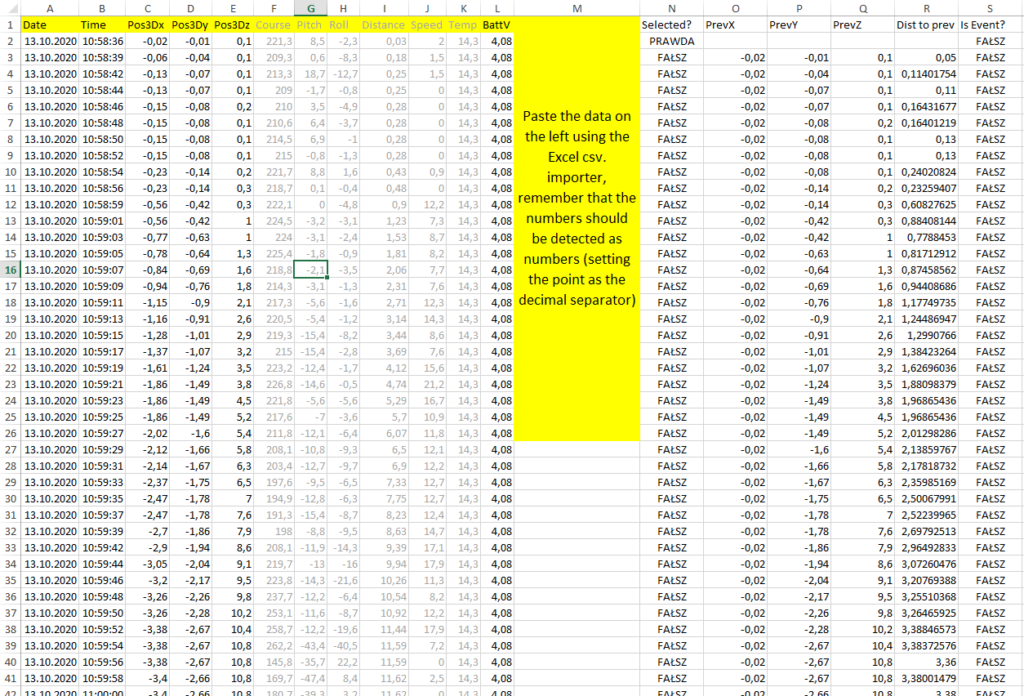
Nach dem Importieren der CSV-Datei in Excel sollten Sie Daten wie diese sehen:
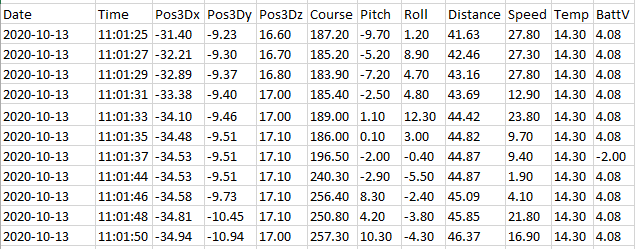
Wichtig ist hierbei die Tatsache, dass Kurs/Distanz/Geschwindigkeit nur momentane Daten sind, die nicht zur Konvertierung der Route verwendet werden sollten.
Legen Sie stattdessen die X-, Y- und Z-Positionen zu Grunde. Hierbei handelt es sich um relative Entfernungen vom Punkt 0,0 (Startpunkt) zu allen von der ENC gespeicherten Punkten.
Das Vorhandensein eines Wegpunkts wird unter der Akkuanzeige (BattV) mit einem Minuszeichen dargestellt. „-2“ steht also für Wegpunkt 2.
Bei einigen Programmen für die Höhlenvermessung können Sie diese Daten bereits direkt einfügen.
Punktverringerung
Bei dieser Vermessung über eine Distanz von 130 m wurden 263 Punkte erfasst. Wenn Sie alle diese Punkte in die Vermessungssoftware importieren, kann dies eine erhebliche Arbeitslast bedeuten, da die Anzahl der Punkte in der Regel deutlich geringer ist.
Außerdem unterscheiden sich die allgemeinen Notationsweisen bei der Höhlenvermessung. Gängige Schreibweisen (die von nahe zu allen bekannten Vermessungsprogrammen akzeptiert werden) sind:

- Von – Name des Vermessungs-Startpunkts
- Bis – Name des Vermessungs-Endpunkts
- Band – Gerade Linie zwischen den Punkten
- Kompass – Richtung vom Start- zum Endpunkt
- Clino – Clinometer (Leinenwinkel zwischen Start- und Endpunkt)
- VonTiefe – Tiefe am Startpunkt
- BisTiefe – Tiefe am Endpunkt
Zur Vereinfachung der Routenkonvertierung haben wir eine Excel-Tabelle vorbereitet, die die Arbeit erleichtert.
Mit dieser Tabelle kann die Anzahl der Punkte verringert werden (um die Datendichte zu verringern), und es wird der direkte Austausch der Datenformate ermöglich.
Ein Beispiel – Mithilfe der Musterdatei geben wir Folgendes in den Konverter ein:
Die Verringerungsparameter werden auf ‚999‘ und ‚FALSE‘ gesetzt.
Im Ergebnis werden die 263 erfassten Punkte zu einer Vermessung mit 8 Etappen reduziert – so, wie bei einer normalen Höhlenvermessung.

Der gleiche Konverter kann auch für Daten verwendet werden, die mit einer am Scooter angebrachten ENC erfasst wurden.
Vermessungsdaten in diesem Format lassen sich leicht in jede Art von Höhlen-Vermessungssoftware einfügen und dort weiterverarbeiten.
Datengenauigkeit
Es gibt bestimmte Genauigkeitsbeschränkungen, die mit dem Effekt am Leinenende zusammenhängen.
- Die Temperaturanzeige pendelt sich u. U. erst nach 20-30 Sekunden ein, z. B. beim Durchqueren einer Sprungschicht.
- Die Kompassgenauigkeit liegt bei korrekter Kalibrierung bei unter 2,5 ° (Informationen zur Definition der Kompassgenauigkeit finden Sie im Abschnitt FAQ).
- Die maximale Fehlerrate des Drucksensors beträgt 0,3 m. Aufgrund des Zuverlässigkeitsbereichs von bis zu 300 m, kann die Tiefe in bestimmten Situationen mi einer Genauigkeit von +-0,3 m aufgezeichnet werden.
- Die Auflösung der Leinenvermessung beträgt 3,62 cm. Der Messfehler kann unter normalen Bedingungen nicht größer werden.
- Die Kompassgenauigkeit liegt bei Vermessung von Hand und korrekter Kalibrierung bei unter 2,5*. Weitere Informationen finden Sie im ENC-Handbuch.
- Loop-Schluss-Fehler: Bei korrekter Kalibrierung und Anwendung des Geräts liegt dieser Fehler bei ca. 1 %.
Fehlerbehebung
| Symptom | Ursache | Lösung |
| Die ermittelte Länge ist nicht korrekt. | Falscher Kalibrierungsfaktor | Prüfen Sie, ob der Kalibrierungsfaktor in den für den Surveyor passenden Wert geändert wurde. |
| Fremdkörper im Bereich des Messrads | Lösen Sie die Schraube des Messrads, und reinigen Sie das Messrad. | |
| Großer Loop-Schluss-Fehler | Unzureichende Kompasskalibrierung | Kalibrieren Sie den Kompass |
| Der Installationswinkel wird nicht eingehalten. | Prüfen Sie, welcher Winkel eingestellt ist und behalten Sie diesen während der Vermessung bei. | |
| Fremdkörper im Bereich des Messrads, die das Rad hin und wieder blockieren | Lösen Sie die Schraube des Messrads, und reinigen Sie das Messrad. | |
| Die Entfernung wird nicht gemessen. | Kabel oder Stecker beschädigt | Reinigen Sie den Stecker. Schafft dies keine Abhilfe, wenden Sie sich an den Seacraft-Service. |
| Magneten beschädigt | Zerlegen Sie das Messrad, und prüfen Sie die Magnete auf Schäden/Korrosion | |
| Blockiertes Messrad | ||
| Das Rad funktioniert nicht korrekt | Rad zu fest angezogen | Lösen Sie die Arretierungsschraube um 1/8 Umdrehung, und prüfen Sie den Spielraum erneut. |
| Verschmutzung/Materialschaden | Zerlegen Sie das Rad, reinigen Sie es und den Kontaktbereich, und prüfen Sie die Teile auf Kratzer. |